
Chauhan, Vishal, Anubhav, Anubhav, Sidhu, Robin, Asabe, Yu, Tanaka, Kanta, Chang, Chia-Ming, Su, Xiang, Javanmardi, Dr. Ehsan, Igarashi, Takeo, Orsholits, Alex, Fujiwara, Kantaro, Tsukada, Manabu, "A Silent Negotiator? Cross-cultural VR Evaluation of Smart Pole Interaction Units in Dynamic Shared Spaces", In: The ACM Symposium on Virtual Reality Software and Technology (VRST2025) , Montreal, Canada, 2025.Proceedings Article | Abstract | Links | BibTeX
@inproceedings{Chauhan2025b,
title = {A Silent Negotiator? Cross-cultural VR Evaluation of Smart Pole Interaction Units in Dynamic Shared Spaces},
author = {Vishal Chauhan and Anubhav Anubhav and Robin Sidhu and Yu Asabe and Kanta Tanaka and Chia-Ming Chang and Xiang Su and Dr. Ehsan Javanmardi and Takeo Igarashi and Alex Orsholits and Kantaro Fujiwara and Manabu Tsukada},
url = {https://github.com/tlab-wide/Smartpole-VR-AWSIM.git},
doi = {10.1145/3756884.3765991},
year = {2025},
date = {2025-11-12},
urldate = {2025-11-12},
booktitle = {The ACM Symposium on Virtual Reality Software and Technology (VRST2025) },
address = {Montreal, Canada},
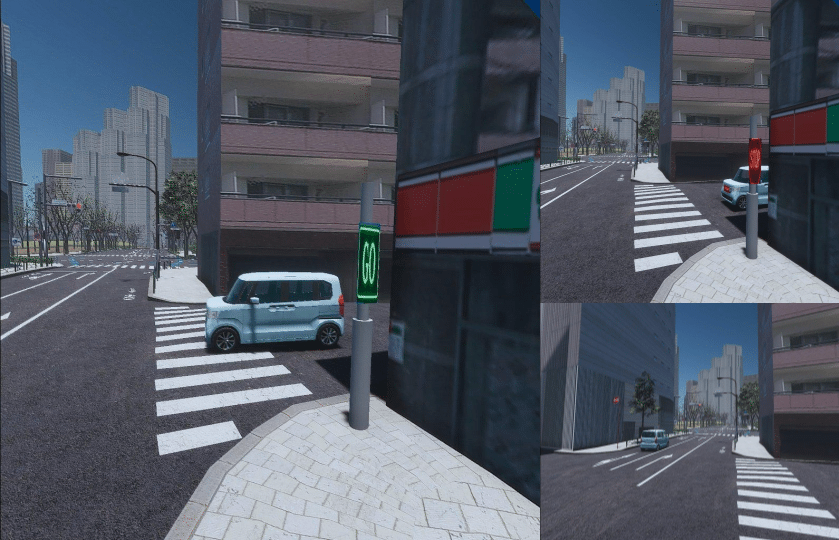
abstract = {As autonomous vehicles (AVs) enter pedestrian-centric environments, existing vehicle-mounted external human–machine interfaces (eHMIs) often fall short in shared spaces due to line-of-sight limitations, inconsistent signaling, and increased cognitive burden on pedestrians. To address these challenges, we introduce the Smart Pole Interaction Unit (SPIU), an infrastructure-based eHMI that decouples intent signaling from vehicles and provides context-aware, elevated visual cues. We evaluate SPIU using immersive VR-AWSIM simulations in four high-risk urban scenarios: four-way intersections, autonomous mixed traffic, blindspots, and nighttime crosswalks. The experiment was developed in Japan and replicated in Norway, where forty participants engaged in 32 trials each under both SPIU-present and SPIU-absent conditions. Behavioral (response time) and subjective (acceptance scale) data were collected. Results show that SPIU significantly improves pedestrian decision-making, with reductions ranging from 40% to over 80% depending on scenario and cultural context, particularly in complex or low-visibility scenarios. Cross-cultural analyses highlight SPIU's adaptability across differing urban and social contexts. We release our open-source Smartpole-VR-AWSIM framework to support reproducibility and global advancement of infrastructure-based eHMI research through reproducible and immersive behavioral studies.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
As autonomous vehicles (AVs) enter pedestrian-centric environments, existing vehicle-mounted external human–machine interfaces (eHMIs) often fall short in shared spaces due to line-of-sight limitations, inconsistent signaling, and increased cognitive burden on pedestrians. To address these challenges, we introduce the Smart Pole Interaction Unit (SPIU), an infrastructure-based eHMI that decouples intent signaling from vehicles and provides context-aware, elevated visual cues. We evaluate SPIU using immersive VR-AWSIM simulations in four high-risk urban scenarios: four-way intersections, autonomous mixed traffic, blindspots, and nighttime crosswalks. The experiment was developed in Japan and replicated in Norway, where forty participants engaged in 32 trials each under both SPIU-present and SPIU-absent conditions. Behavioral (response time) and subjective (acceptance scale) data were collected. Results show that SPIU significantly improves pedestrian decision-making, with reductions ranging from 40% to over 80% depending on scenario and cultural context, particularly in complex or low-visibility scenarios. Cross-cultural analyses highlight SPIU's adaptability across differing urban and social contexts. We release our open-source Smartpole-VR-AWSIM framework to support reproducibility and global advancement of infrastructure-based eHMI research through reproducible and immersive behavioral studies.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}