塚田研究室は2019年、東京大学大学院 情報理工学系研究科 創造情報学専攻に設立されました。コンピュータネットワークとサイバーフィジカルシステムを基盤に、協調型自動運転、混合現実、次世代通信、没入型メディアなど幅広い研究に取り組んでいます。
0%

塚田研究室は2019年、東京大学大学院 情報理工学系研究科 創造情報学専攻に設立されました。コンピュータネットワークとサイバーフィジカルシステムを基盤に、協調型自動運転、混合現実、次世代通信、没入型メディアなど幅広い研究に取り組んでいます。
Associate Professor Manabu Tsukada, Assistant Professor Ehsan Javanmardi, and Ph.D. candidate (D3) Huan Meng participated in the IEEE International Conference on Intelligent Transportation Systems (ITSC 2025), held in Gold Coast, Australia, in November 2025. ITSC is one of the leading international conferences in the intelligent transportation systems field, bringing together researchers from around the world for discussions on the latest research and technological advances.
- Tsukada, Manabu, “Adaptive V2X Collaboration for End-to-End Autonomous Driving”, Keynote at DriveX (3rd Edition) Workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving In conjunction with ITSC 2025, Nov 18, Gold Coast, Australia, 18.11.2025.
- Meng, Huan, Zhang, Jinhui, Huang, Xiaobing, Javanmardi, Ehsan, Tsukada, Manabu, “Patch Exploration-Based Route Planning for Autonomous Vehicles”, In: 28th IEEE International Conference on Intelligent Transportation Systems (ITSC2025), Gold Coast, Australia, 2025.
11月 21

Our student presented a paper at IROS2025!
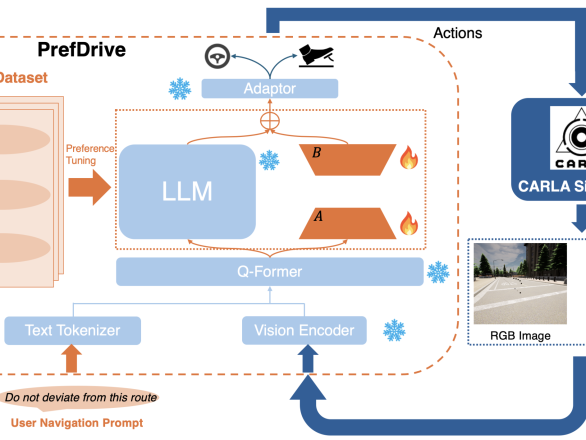
Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “Multi-PrefDrive: Optimizing Large Language Models for Autonomous Driving Through Multi-Preference Tuning”, In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
11月 6
Visit of Prof. Soheib Fergani from LAAS-CNRS🇫🇷 #utokyo #東京大学
11月 4
Workshop on Shaping the Future of 6G: Innovation, Intelligence, and Sustainability
Panel discussion on AI for 6G and Beyond: Intelligent Networks and Digital Twin Synergies
at International Conference on ICT Convergence (ICTC2025), Jeju Island, Korea, 2025-10-17
10月 17
Our Ph.D student presented in IAVVC 2025 at Baden-Baden, Germany🚀
Dongyang Li, Ehsan Javanmardi, Manabu Tsukada, “State-Guided Spatial Cross-Attention for Enhanced End-to-End Autonomous Driving”, In: IEEE International Automated Vehicle Validation Conference (IAVVC 2025), Baden-Baden, Germany, 2025.
10月 6
Farewell for Daniel. #utokyo #東京大学
9月 26
Highlights from CIV Summer School 2025 in Blonay, Switzerland 🇨🇭✨
A week full of inspiring lectures, poster sessions, hackathons, and cultural exchanges — combining academic excellence with great community spirit.
https://civ-summerschool.org/
Looking forward to the next edition! 🚀
#CIVSummerSchool #ResearchLife #CooperativeIntelligence #AcademicEvents
9月 5
We present two works at IEEE MetaCom 2025 at Seoul, Republic of Korea.
- Shangkai Zhang, Alex Orsholits, Ehsan Javanmardi, Manabu Tsukada, “AWSIM-VR: A Tightly-Coupled Virtual Reality Extension for Human-in-the-Loop Pedestrian-Autonomous Vehicle Interaction”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
- Naren Bao, Alex Orsholits, Manabu Tsukada, “4D Path Planning via Spatiotemporal Voxels in Urban Airspaces”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
9月 2
Experiments in the Kashiwa campus
8月 5
We have two presentations and two workshop keynote talks in IEEE IV2025 @ Cluj - Napoca, Romania.
- Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “PrefDrive: Enhancing Autonomous Driving through Preference-Guided Large Language Models”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki, “Towards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Manabu Tsukada, “V2X Communication Technologies in the Era of End-to-End Autonomous Driving”, Keynote talk at The 2nd Workshop on Secure connected vehicles: Digital Twin, UAVs, and Smart Transportation, at IEEE IV 2025, Cluj-Napoca, Romania, 22.06.2025.
- Ehsan Javanmardi, “From Lab to Road: Advances and Challenges in V2X Cooperative Perception for AVs”, Keynote talk at 14th Workshop and Industry Panel on Cooperative Automated Driving and Future Mobility Systems at IEEE IV2025, Cluj - Napoca, Romania, 22.06.2025.
6月 25







Associate Professor Manabu Tsukada, Assistant Professor Ehsan Javanmardi, and Ph.D. candidate (D3) Huan Meng participated in the IEEE International Conference on Intelligent Transportation Systems (ITSC 2025), held in Gold Coast, Australia, in November 2025. ITSC is one of the leading international conferences in the intelligent transportation systems field, bringing together researchers from around the world for discussions on the latest research and technological advances.
- Tsukada, Manabu, “Adaptive V2X Collaboration for End-to-End Autonomous Driving”, Keynote at DriveX (3rd Edition) Workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving In conjunction with ITSC 2025, Nov 18, Gold Coast, Australia, 18.11.2025.
- Meng, Huan, Zhang, Jinhui, Huang, Xiaobing, Javanmardi, Ehsan, Tsukada, Manabu, “Patch Exploration-Based Route Planning for Autonomous Vehicles”, In: 28th IEEE International Conference on Intelligent Transportation Systems (ITSC2025), Gold Coast, Australia, 2025.
11月 21
Our student presented a paper at IROS2025!
Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “Multi-PrefDrive: Optimizing Large Language Models for Autonomous Driving Through Multi-Preference Tuning”, In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
11月 6
Visit of Prof. Soheib Fergani from LAAS-CNRS🇫🇷 #utokyo #東京大学
11月 4
Workshop on Shaping the Future of 6G: Innovation, Intelligence, and Sustainability
Panel discussion on AI for 6G and Beyond: Intelligent Networks and Digital Twin Synergies
at International Conference on ICT Convergence (ICTC2025), Jeju Island, Korea, 2025-10-17
10月 17
Our Ph.D student presented in IAVVC 2025 at Baden-Baden, Germany🚀
Dongyang Li, Ehsan Javanmardi, Manabu Tsukada, “State-Guided Spatial Cross-Attention for Enhanced End-to-End Autonomous Driving”, In: IEEE International Automated Vehicle Validation Conference (IAVVC 2025), Baden-Baden, Germany, 2025.
10月 6
Farewell for Daniel. #utokyo #東京大学
9月 26
Highlights from CIV Summer School 2025 in Blonay, Switzerland 🇨🇭✨
A week full of inspiring lectures, poster sessions, hackathons, and cultural exchanges — combining academic excellence with great community spirit.
https://civ-summerschool.org/
Looking forward to the next edition! 🚀
#CIVSummerSchool #ResearchLife #CooperativeIntelligence #AcademicEvents
9月 5
We present two works at IEEE MetaCom 2025 at Seoul, Republic of Korea.
- Shangkai Zhang, Alex Orsholits, Ehsan Javanmardi, Manabu Tsukada, “AWSIM-VR: A Tightly-Coupled Virtual Reality Extension for Human-in-the-Loop Pedestrian-Autonomous Vehicle Interaction”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
- Naren Bao, Alex Orsholits, Manabu Tsukada, “4D Path Planning via Spatiotemporal Voxels in Urban Airspaces”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
9月 2
Experiments in the Kashiwa campus
8月 5
We have two presentations and two workshop keynote talks in IEEE IV2025 @ Cluj - Napoca, Romania.
- Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “PrefDrive: Enhancing Autonomous Driving through Preference-Guided Large Language Models”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki, “Towards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Manabu Tsukada, “V2X Communication Technologies in the Era of End-to-End Autonomous Driving”, Keynote talk at The 2nd Workshop on Secure connected vehicles: Digital Twin, UAVs, and Smart Transportation, at IEEE IV 2025, Cluj-Napoca, Romania, 22.06.2025.
- Ehsan Javanmardi, “From Lab to Road: Advances and Challenges in V2X Cooperative Perception for AVs”, Keynote talk at 14th Workshop and Industry Panel on Cooperative Automated Driving and Future Mobility Systems at IEEE IV2025, Cluj - Napoca, Romania, 22.06.2025.
6月 25












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}