塚田研究室は2019年、東京大学大学院 情報理工学系研究科 創造情報学専攻に設立されました。コンピュータネットワークとサイバーフィジカルシステムを基盤に、協調型自動運転、混合現実、次世代通信、没入型メディアなど幅広い研究に取り組んでいます。
0%

塚田研究室は2019年、東京大学大学院 情報理工学系研究科 創造情報学専攻に設立されました。コンピュータネットワークとサイバーフィジカルシステムを基盤に、協調型自動運転、混合現実、次世代通信、没入型メディアなど幅広い研究に取り組んでいます。
Our student presented a paper at IROS2025!
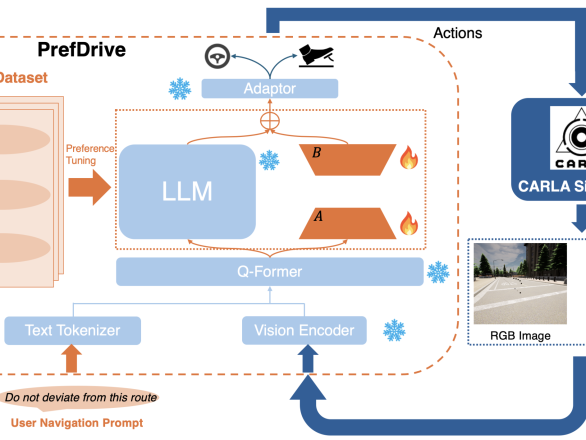
Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “Multi-PrefDrive: Optimizing Large Language Models for Autonomous Driving Through Multi-Preference Tuning”, In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
11月 6

Visit of Prof. Soheib Fergani from LAAS-CNRS🇫🇷 #utokyo #東京大学
11月 4
Workshop on Shaping the Future of 6G: Innovation, Intelligence, and Sustainability
Panel discussion on AI for 6G and Beyond: Intelligent Networks and Digital Twin Synergies
at International Conference on ICT Convergence (ICTC2025), Jeju Island, Korea, 2025-10-17
10月 17
Our Ph.D student presented in IAVVC 2025 at Baden-Baden, Germany🚀
Dongyang Li, Ehsan Javanmardi, Manabu Tsukada, “State-Guided Spatial Cross-Attention for Enhanced End-to-End Autonomous Driving”, In: IEEE International Automated Vehicle Validation Conference (IAVVC 2025), Baden-Baden, Germany, 2025.
10月 6
Farewell for Daniel. #utokyo #東京大学
9月 26
Highlights from CIV Summer School 2025 in Blonay, Switzerland 🇨🇭✨
A week full of inspiring lectures, poster sessions, hackathons, and cultural exchanges — combining academic excellence with great community spirit.
https://civ-summerschool.org/
Looking forward to the next edition! 🚀
#CIVSummerSchool #ResearchLife #CooperativeIntelligence #AcademicEvents
9月 5
We present two works at IEEE MetaCom 2025 at Seoul, Republic of Korea.
- Shangkai Zhang, Alex Orsholits, Ehsan Javanmardi, Manabu Tsukada, “AWSIM-VR: A Tightly-Coupled Virtual Reality Extension for Human-in-the-Loop Pedestrian-Autonomous Vehicle Interaction”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
- Naren Bao, Alex Orsholits, Manabu Tsukada, “4D Path Planning via Spatiotemporal Voxels in Urban Airspaces”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
9月 2
Experiments in the Kashiwa campus
8月 5
We have two presentations and two workshop keynote talks in IEEE IV2025 @ Cluj - Napoca, Romania.
- Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “PrefDrive: Enhancing Autonomous Driving through Preference-Guided Large Language Models”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki, “Towards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Manabu Tsukada, “V2X Communication Technologies in the Era of End-to-End Autonomous Driving”, Keynote talk at The 2nd Workshop on Secure connected vehicles: Digital Twin, UAVs, and Smart Transportation, at IEEE IV 2025, Cluj-Napoca, Romania, 22.06.2025.
- Ehsan Javanmardi, “From Lab to Road: Advances and Challenges in V2X Cooperative Perception for AVs”, Keynote talk at 14th Workshop and Industry Panel on Cooperative Automated Driving and Future Mobility Systems at IEEE IV2025, Cluj - Napoca, Romania, 22.06.2025.
6月 25
Prof. Tsukada will present “Enabling Cooperative End-to-End Autonomous Driving: Feature Sharing, Adaptation, and Preference Learning” at Workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving In conjunction with CVPR 2025 at Nashville, USA on 12.06.2025. https://drivex-workshop.github.io/
6月 10







Our student presented a paper at IROS2025!
Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “Multi-PrefDrive: Optimizing Large Language Models for Autonomous Driving Through Multi-Preference Tuning”, In: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
11月 6
Visit of Prof. Soheib Fergani from LAAS-CNRS🇫🇷 #utokyo #東京大学
11月 4
Workshop on Shaping the Future of 6G: Innovation, Intelligence, and Sustainability
Panel discussion on AI for 6G and Beyond: Intelligent Networks and Digital Twin Synergies
at International Conference on ICT Convergence (ICTC2025), Jeju Island, Korea, 2025-10-17
10月 17
Our Ph.D student presented in IAVVC 2025 at Baden-Baden, Germany🚀
Dongyang Li, Ehsan Javanmardi, Manabu Tsukada, “State-Guided Spatial Cross-Attention for Enhanced End-to-End Autonomous Driving”, In: IEEE International Automated Vehicle Validation Conference (IAVVC 2025), Baden-Baden, Germany, 2025.
10月 6
Farewell for Daniel. #utokyo #東京大学
9月 26
Highlights from CIV Summer School 2025 in Blonay, Switzerland 🇨🇭✨
A week full of inspiring lectures, poster sessions, hackathons, and cultural exchanges — combining academic excellence with great community spirit.
https://civ-summerschool.org/
Looking forward to the next edition! 🚀
#CIVSummerSchool #ResearchLife #CooperativeIntelligence #AcademicEvents
9月 5
We present two works at IEEE MetaCom 2025 at Seoul, Republic of Korea.
- Shangkai Zhang, Alex Orsholits, Ehsan Javanmardi, Manabu Tsukada, “AWSIM-VR: A Tightly-Coupled Virtual Reality Extension for Human-in-the-Loop Pedestrian-Autonomous Vehicle Interaction”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
- Naren Bao, Alex Orsholits, Manabu Tsukada, “4D Path Planning via Spatiotemporal Voxels in Urban Airspaces”, In: 3rd Annual IEEE International Conference on Metaverse Computing, Networking, and Applications (IEEE MetaCom 2025), Seoul, Republic of Korea, 2025.
9月 2
Experiments in the Kashiwa campus
8月 5
We have two presentations and two workshop keynote talks in IEEE IV2025 @ Cluj - Napoca, Romania.
- Yun Li, Ehsan Javanmardi, Simon Thompson, Kai Katsumata, Alex Orsholits, Manabu Tsukada, “PrefDrive: Enhancing Autonomous Driving through Preference-Guided Large Language Models”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki, “Towards Efficient Roadside LiDAR Deployment: A Fast Surrogate Metric Based on Entropy-Guided Visibility”, In: 36th IEEE Intelligent Vehicles Symposium (IV2025), Cluj-Napoca, Romania, 2025.
- Manabu Tsukada, “V2X Communication Technologies in the Era of End-to-End Autonomous Driving”, Keynote talk at The 2nd Workshop on Secure connected vehicles: Digital Twin, UAVs, and Smart Transportation, at IEEE IV 2025, Cluj-Napoca, Romania, 22.06.2025.
- Ehsan Javanmardi, “From Lab to Road: Advances and Challenges in V2X Cooperative Perception for AVs”, Keynote talk at 14th Workshop and Industry Panel on Cooperative Automated Driving and Future Mobility Systems at IEEE IV2025, Cluj - Napoca, Romania, 22.06.2025.
6月 25
Prof. Tsukada will present “Enabling Cooperative End-to-End Autonomous Driving: Feature Sharing, Adaptation, and Preference Learning” at Workshop on Foundation Models for V2X-Based Cooperative Autonomous Driving In conjunction with CVPR 2025 at Nashville, USA on 12.06.2025. https://drivex-workshop.github.io/
6月 10












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}