0%


")
")
")
")
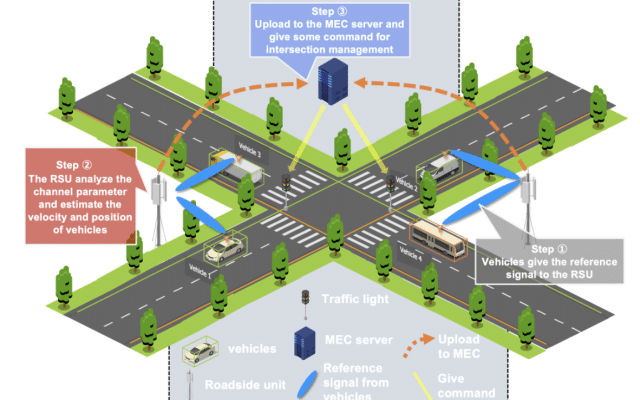
自動運転や高度道路交通システム(ITS)の急速な発展に伴い、協調的なモビリティやV2X(Vehicle-to-Everything)通信において、極めて正確な車両測位が不可欠な基盤となっています。従来のGPSは開けた場所では機能しますが、都市部のビル群やトンネルなどの見通し外(NLoS)環境ではその信頼性が著しく低下します。この課題を解決するため、本研究プロジェクトでは、Beyond 5G/6Gの無線通信チャネルが持つ物理層の情報を活用した、GPSに依存しない統合的な車両測位フレームワークを提案しています。通信とセンシングを融合させることで、遮蔽、高速移動、多ユーザといった厳しい条件下でも高精度を維持できる、インフラ協調型のスケーラブルなソリューションを実現します。
見通し内(LoS)環境に対しては、ミリ波マルチアンテナシステムを基盤とした連続的なトラッキング・アーキテクチャを構築しました。適応型かつ低演算量の2D-MUSICアルゴリズムを開発し、高精度な到来角(DoA)および到達時間(ToA)情報を効率的に抽出します。さらに、これらの空間パラメータをアンセンテッド・カルマンフィルタ(UKF)を用いて車両の運動力学と有機的に融合させます。このMUSICとUKFを密接に結合したアプローチにより、測定ノイズや誤差の蓄積を効果的に抑制し、カーブや交差点などの複雑な道路形状にも適応可能な、安定したリアルタイムの軌跡および速度の推定が可能となります。
直接的な見通し(LoS)経路が遮断された場合、従来の角度ベースの測位は困難になります。この課題を克服するため、本フレームワークは再構成可能インテリジェントサーフェス(RIS)とOTFS(Orthogonal Time Frequency Space)変調を統合した高度なセンシング戦略へと移行します。適切に配置されたRISが障害物を迂回する制御可能な仮想伝搬経路を再構築し、チャネルの観測性を回復させます。同時に、新規の低PAPR(ピーク対平均電力比)パイロット設計によって強化されたOTFS変調が、高速移動に伴う激しいドップラーシフトとマルチパスフェージングを解消します。UKFを活用した2系統の速度推定手法を組み合わせることで、過酷なNLoS環境下でも強靭な追跡性能を保証します。
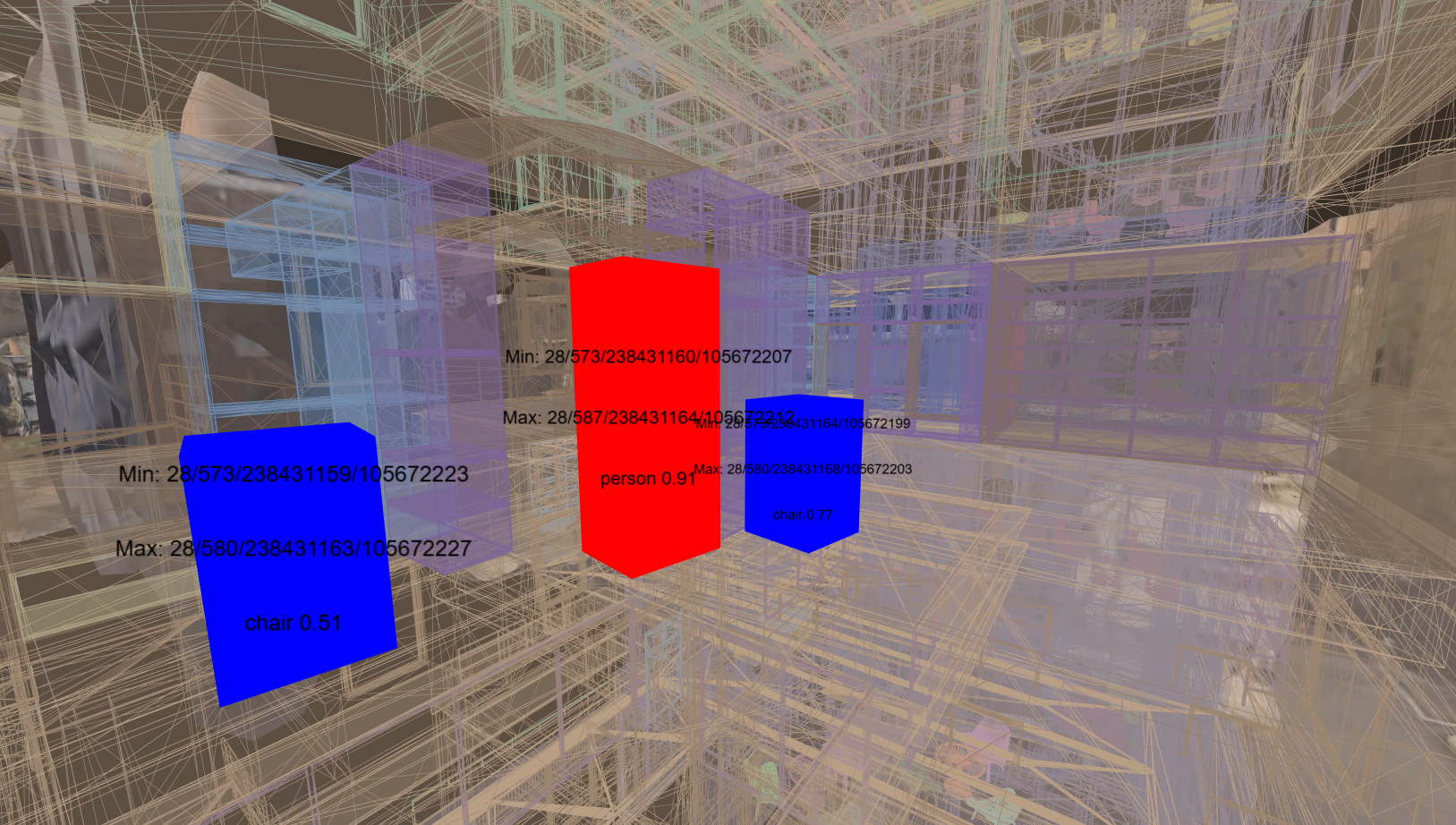
最後に、現実の大規模かつ高密度な交通シナリオでの実用性を担保するため、フレームワークを多ユーザの共存環境へと拡張しました。ページスタイルのフレーム構造に基づく干渉考慮型の反復的逐次干渉除去(SIC)スキームを導入し、重複する複数ユーザの信号を効率的に分離します。さらに、干渉レベルに応じてRoot-MUSIC(低ノイズ条件)とFBSS-MUSIC(強干渉条件)を動的に切り替える適応型DoA推定メカニズムを採用しています。本研究は、古典的なアレイ信号処理と最先端の波形設計を橋渡しするものであり、将来の自動運転モビリティ・ネットワークに求められる協調認知のための、堅牢で信頼性の高い基盤を提供します。

digital twins extended reality

digital twins

autonomous driving machine learning

machine learning v2x

autonomous driving v2x

extended reality

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}