0%




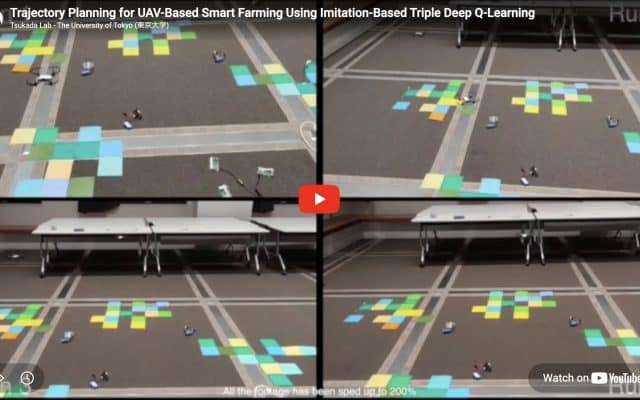
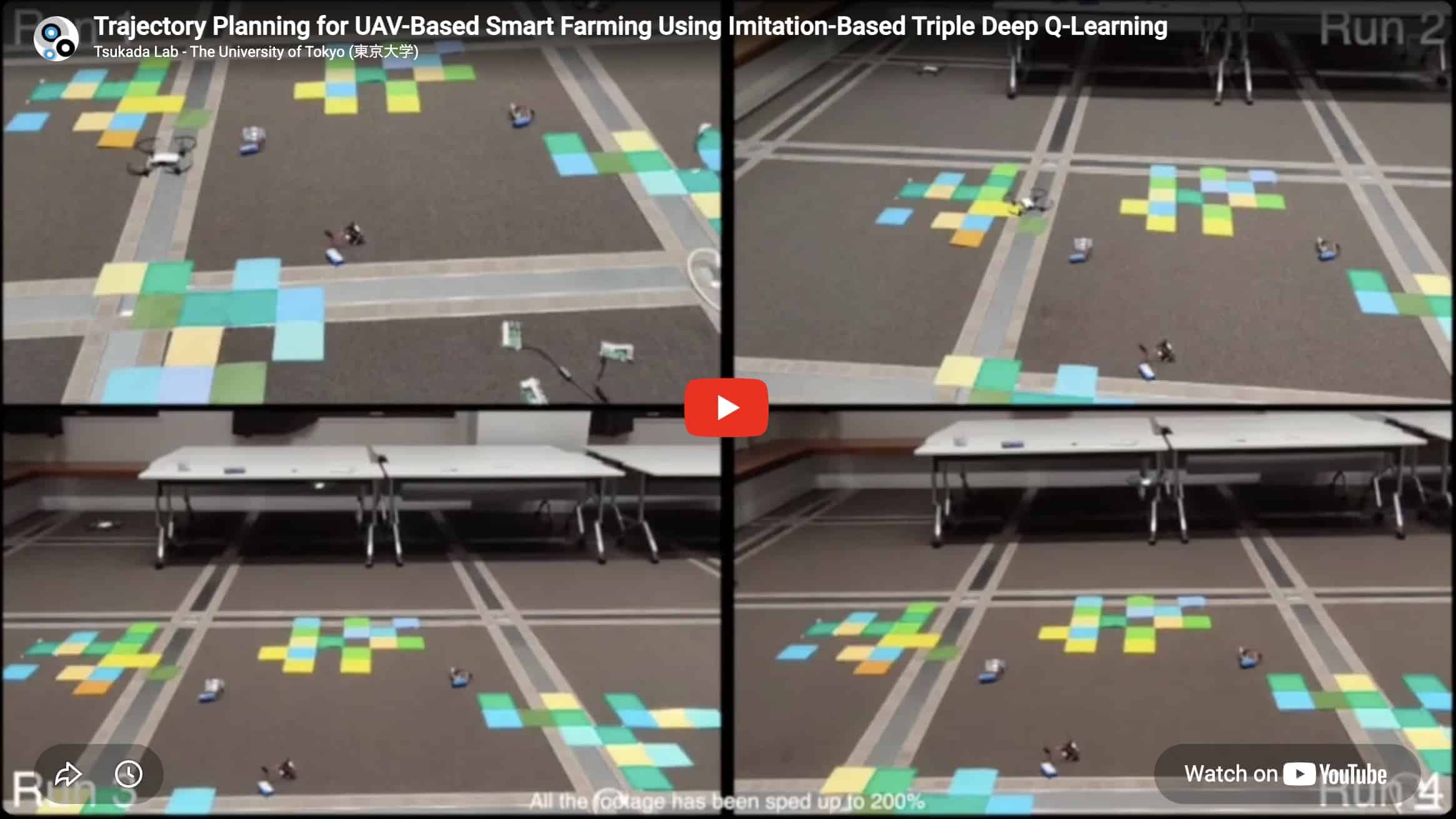
無人航空機(UAV)のレベル4自律飛行は、物流、監視、災害対応など多様な分野で社会的需要が高まっている。しかし、動的環境における安全確保や高精度な経路計画は依然として課題である。従来の手法は空間的経路生成に偏重し、時間変化や移動障害物への適応が不十分であり、さらにGPSが利用できない環境では自己位置推定が困難である。本研究は、これらの課題を克服するために、4D時空間ボクセル表現、世界モデル、安全制約付き強化学習、そしてVLM/VLAモジュールを統合し、科学的に厳密で認証可能な自律飛行フレームワークを構築することを目的とする。
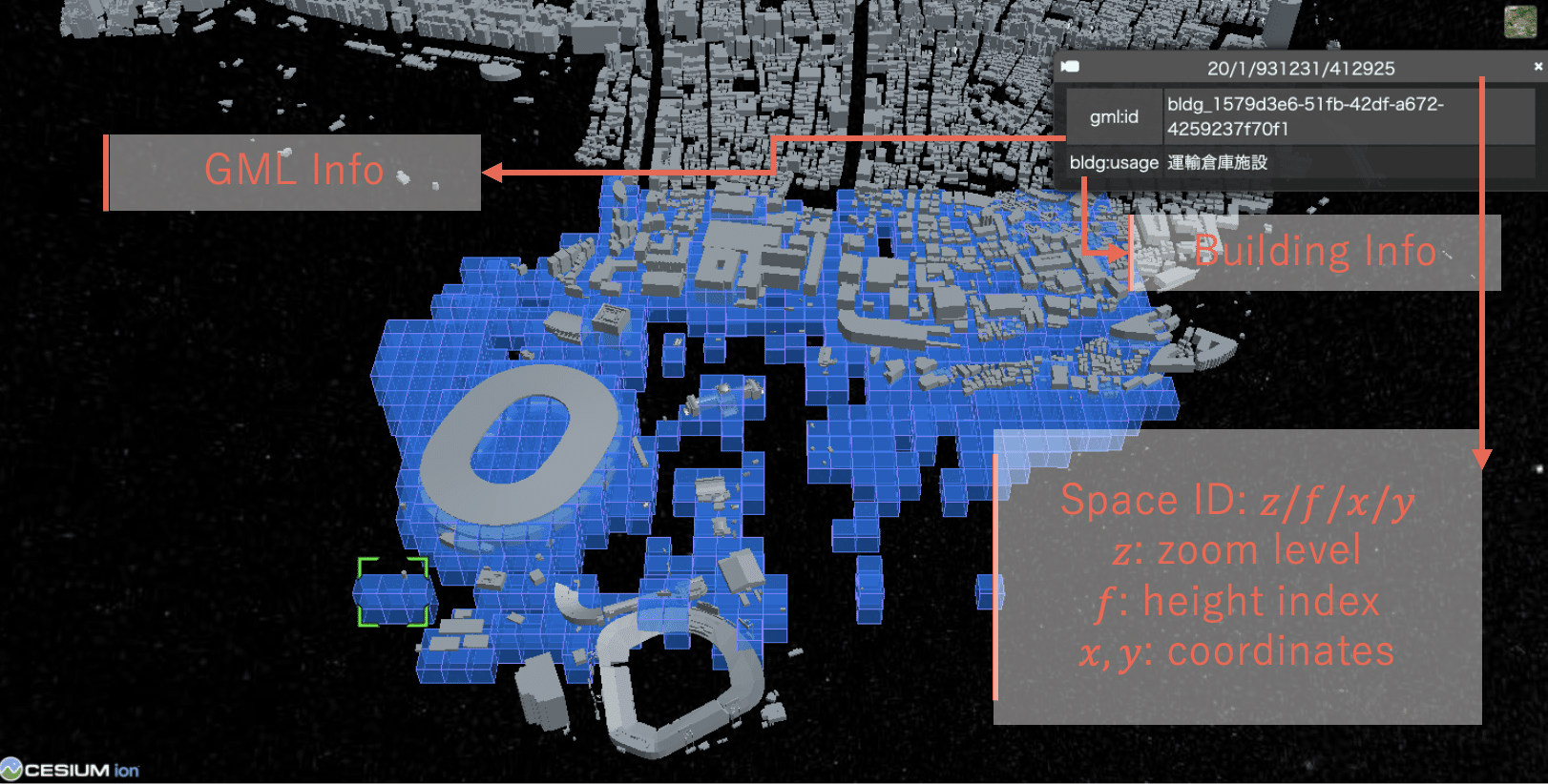
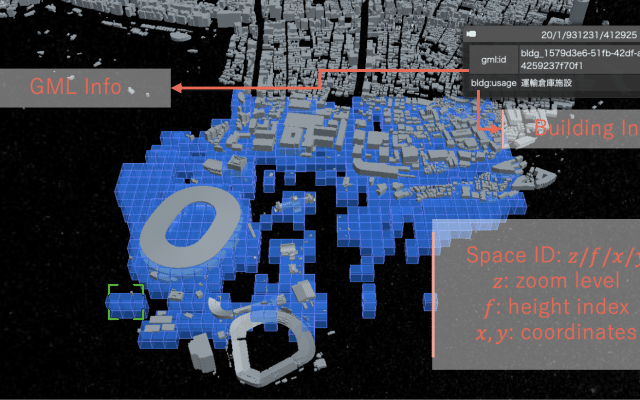
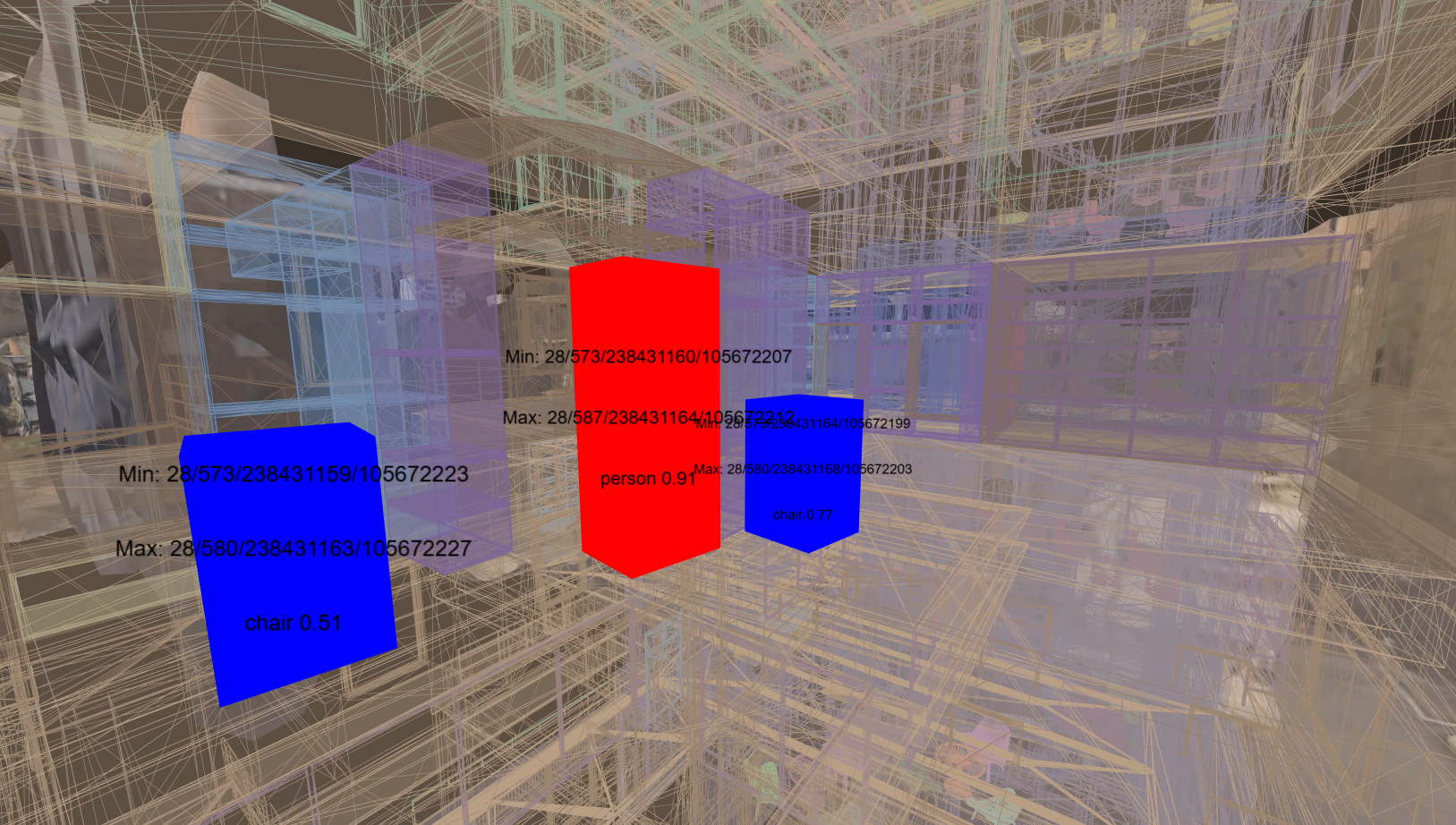
まず、空間と時間を統合した4D時空間ボクセル構造を導入し、静的・動的障害物を一元的に表現する。この表現は可変の時間解像度を持ち、周囲の将来占有空間を予測可能にする。また、世界モデルを用いて環境の時間発展をシミュレートし、移動体の軌道や気象擾乱の影響を短期的に予測する。これにより、経路計画は単なるリアクティブな応答ではなく、未来を見越したリスク認知型へと進化する。
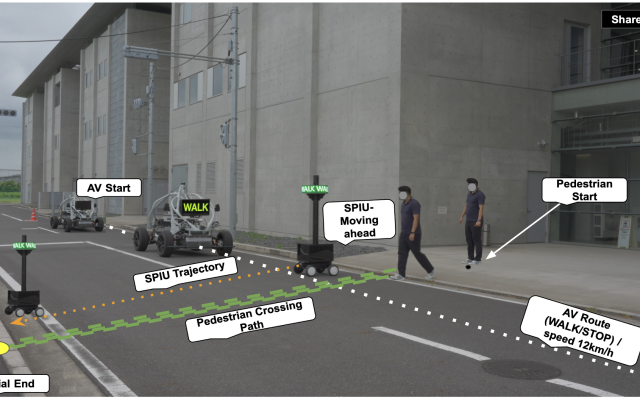
次に、強化学習を用いた経路追従と障害回避の最適化に、安全制約を組み込む。オフラインでは専門家軌跡を利用した事前学習を行い、オンラインでは制御バリア関数や到達可能性解析に基づくシールドを適用して、不安全な行動を抑制する。さらに、GPS非依存環境に対応するため、カメラ映像と自然言語指令を統合するVLM/VLAモジュールを導入する。これにより、人間の高次ミッション指示を直接理解し、地図やGPS信号が不足する状況でも柔軟にタスクを遂行できる。
本研究により、レベル4自律飛行を実現するための新しい科学的枠組みが提示される。期待される成果には、動的環境下での安全性と効率性の定量的改善、GPS非依存環境での安定した自己位置推定とタスク遂行能力の強化、将来のATM/UTMシステムへの統合基盤の提供が含まれる。今後は、マルチエージェント協調や全天候運用、学習保証に基づく認証プロセスの確立、さらに実機飛行デモによる社会実装に向けた検証を進める予定である。

autonomous driving machine learning
machine learning uav
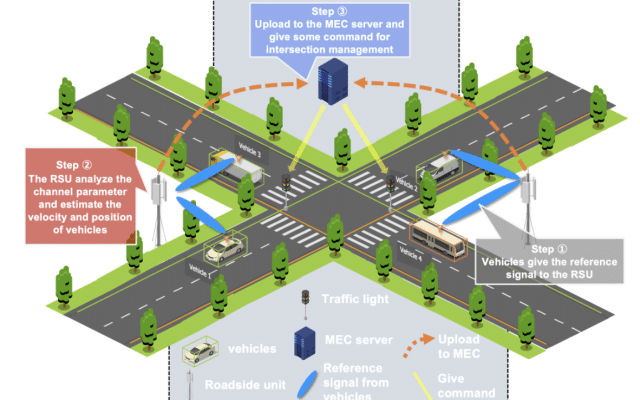
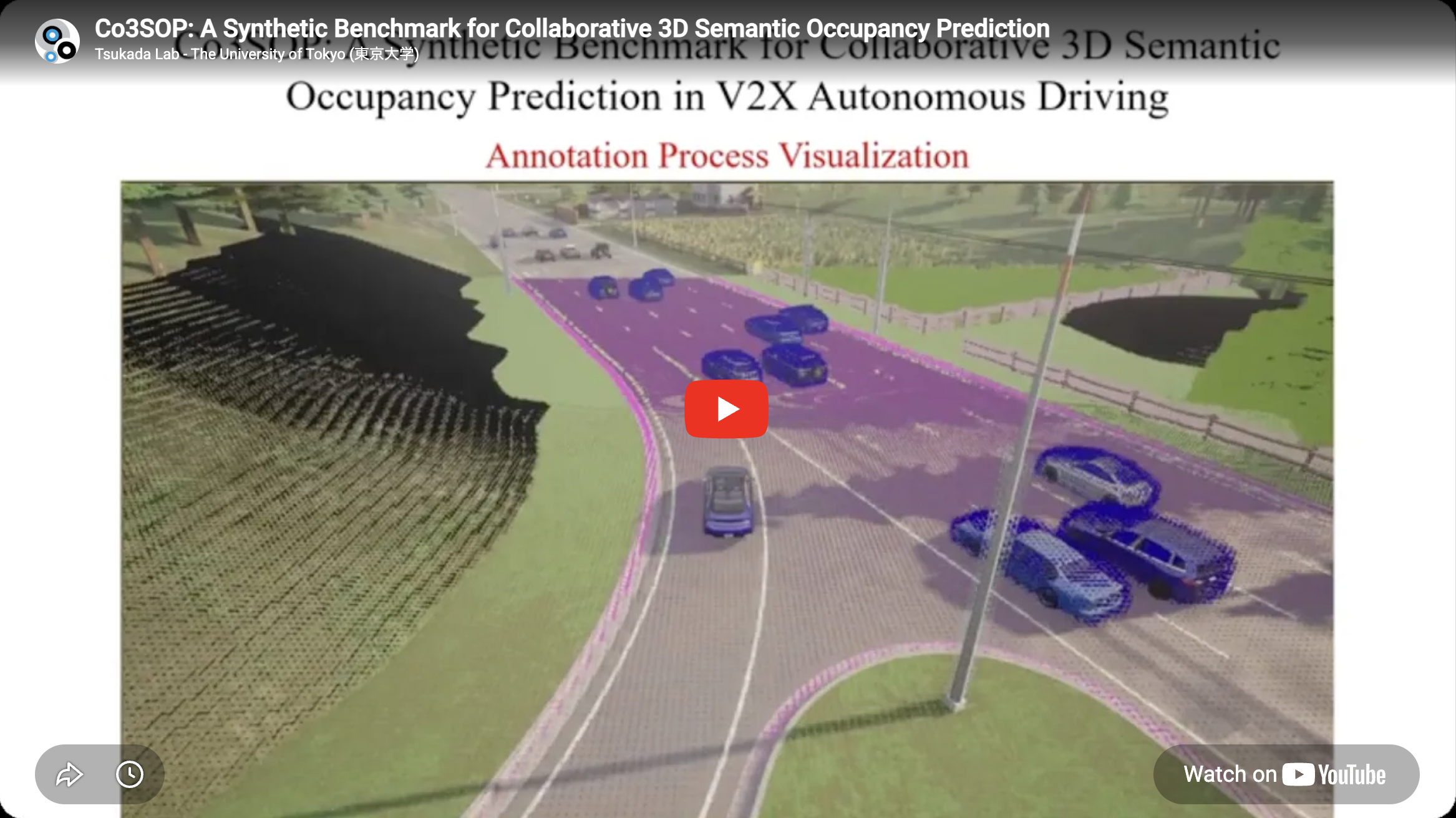
autonomous driving v2x

digital twins extended reality
digital twins uav

autonomous driving machine learning

machine learning v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}