0%

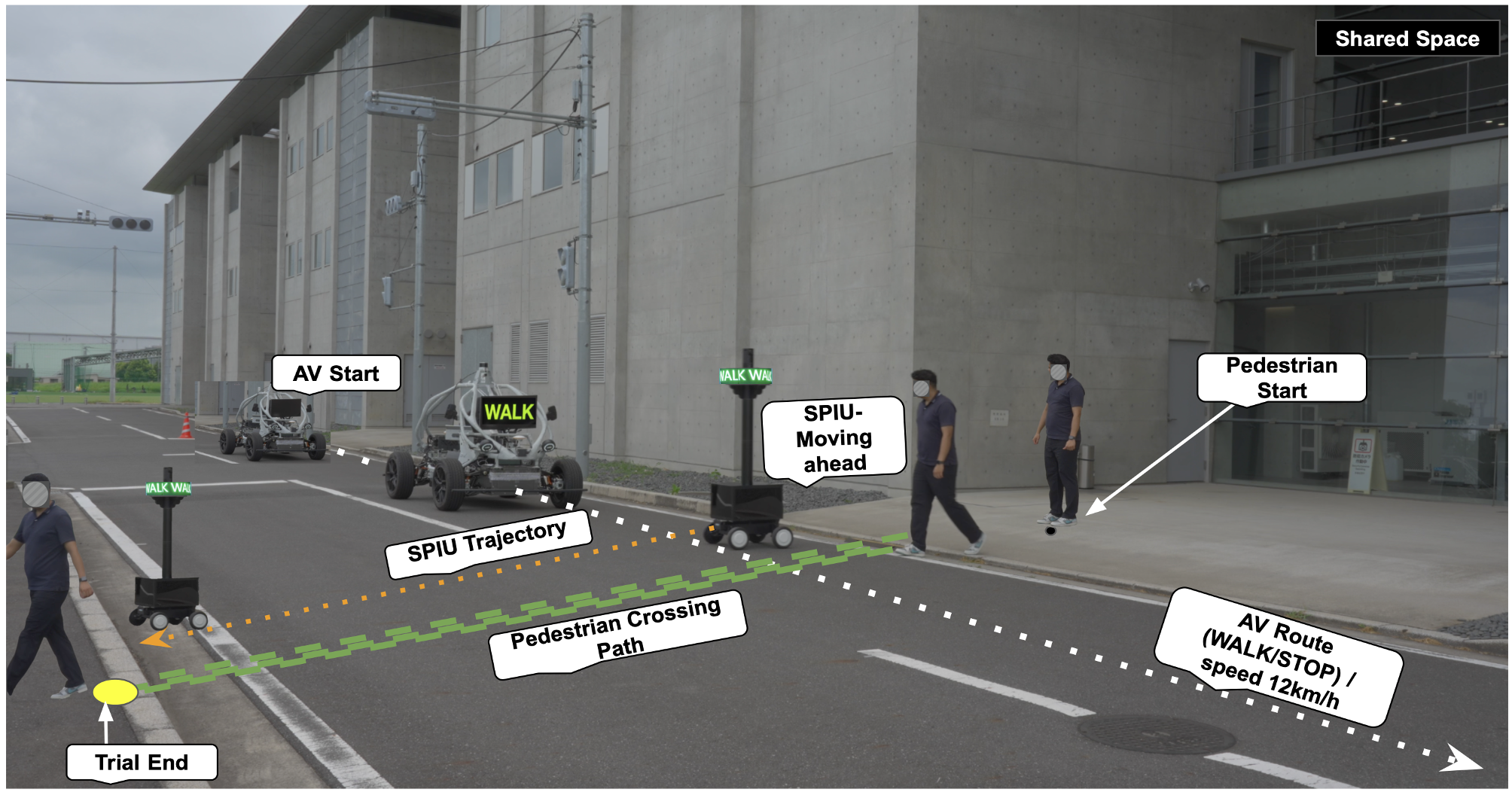







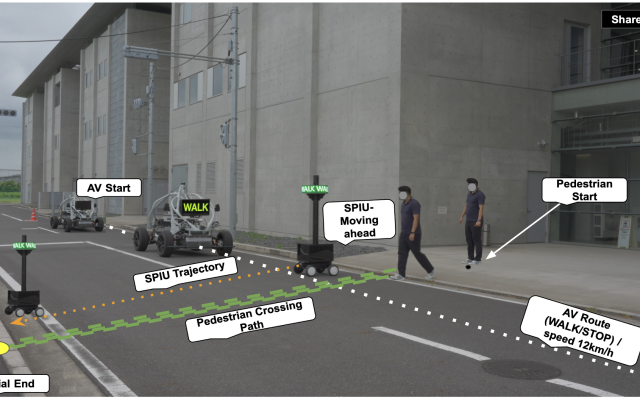
自動運転車が歩行者中心の都市空間へ入り込むにつれ、課題は認識や制御だけでなく、歩行者とのコミュニケーションへと広がっている。共有空間では、歩行者、自転車、車両が明確な車線分離や従来型の信号に強く依存せず、その場で相互に動きを調整する。そこから人間の運転者がいなくなると、歩行者は視線、身振り、譲り合いといった社会的手がかりを失い、車両の意図を不確実なまま推測しなければならない。本プロジェクトは、このコミュニケーション上のギャップに対し、交差点や横断地点の近くから歩行者向けに同期した情報を提示するインフラ側インタフェース、Smart Pole Interaction Unit(SPIU)を提案する。
研究は、概念提案と初期検証から始まった。2023年のIEEE WFIoT論文では、共有空間における歩行者の認知負荷を軽減するためのSPIUの着想を提示し、続くElectronics論文では、没入型VR実験を通してその概念を検証した。これらの初期研究は、移動する車両上の表示だけに依存するのではなく、歩行者から見やすい道路側の媒介を用いることで、自動運転車の意図をより早く、より少ない不確実性で理解できることを示した。すなわち、共有空間のコミュニケーションは車両単体ではなく、交渉が生じる領域全体を対象に設計すべきだという考え方が、この段階で明確になった。
次の段階では、SPIUが何を伝えるべきか、そしてどのように設計されるべきかを掘り下げた。専門家によるディスカッション、シナリオスケッチ、さらにマルチモーダルLLMによる提案との比較を通して、人間とAIが安全な歩行者―自動運転車インタラクションに対してどこで一致し、どこで異なるのかを整理した。この過程により、SPIUは単純な表示装置から、明確な視覚メッセージに加えて、音声、センシング、LiDAR、V2X連携などを組み合わせうるマルチモーダル設計フレームワークへと発展した。同時に、SPIUは車載eHMIを置き換えるのではなく、それを補完して理解を強める存在として最も効果を発揮することも明らかになった。
近年の進捗では、研究は実験室内の検証から、異文化間評価と実世界での展開へと進んでいる。日本で構築しノルウェーで再現したVR-AWSIM環境では、四差路、死角、配送ロボットを含む混合交通、夜間横断といった高リスクな状況において、SPIUが歩行者の意思決定を改善することを示した。さらに最近では、移動型SPIUプロトタイプを製作し、屋外の共有空間で評価を実施した結果、SPIUは理解しやすさ、信頼感、安全感を向上させ、とくに車載eHMIと併用した条件で最も高い効果を示した。共有空間の視覚デザインに関する関連研究も含め、これらの成果はSPIUを将来の歩行者―自動運転車エコシステムに向けた実装可能なインフラ側インタフェースとして位置づけるとともに、今後はより多様なモダリティ、アクセシビリティ、都市導入に向けた発展を示している。

autonomous driving machine learning
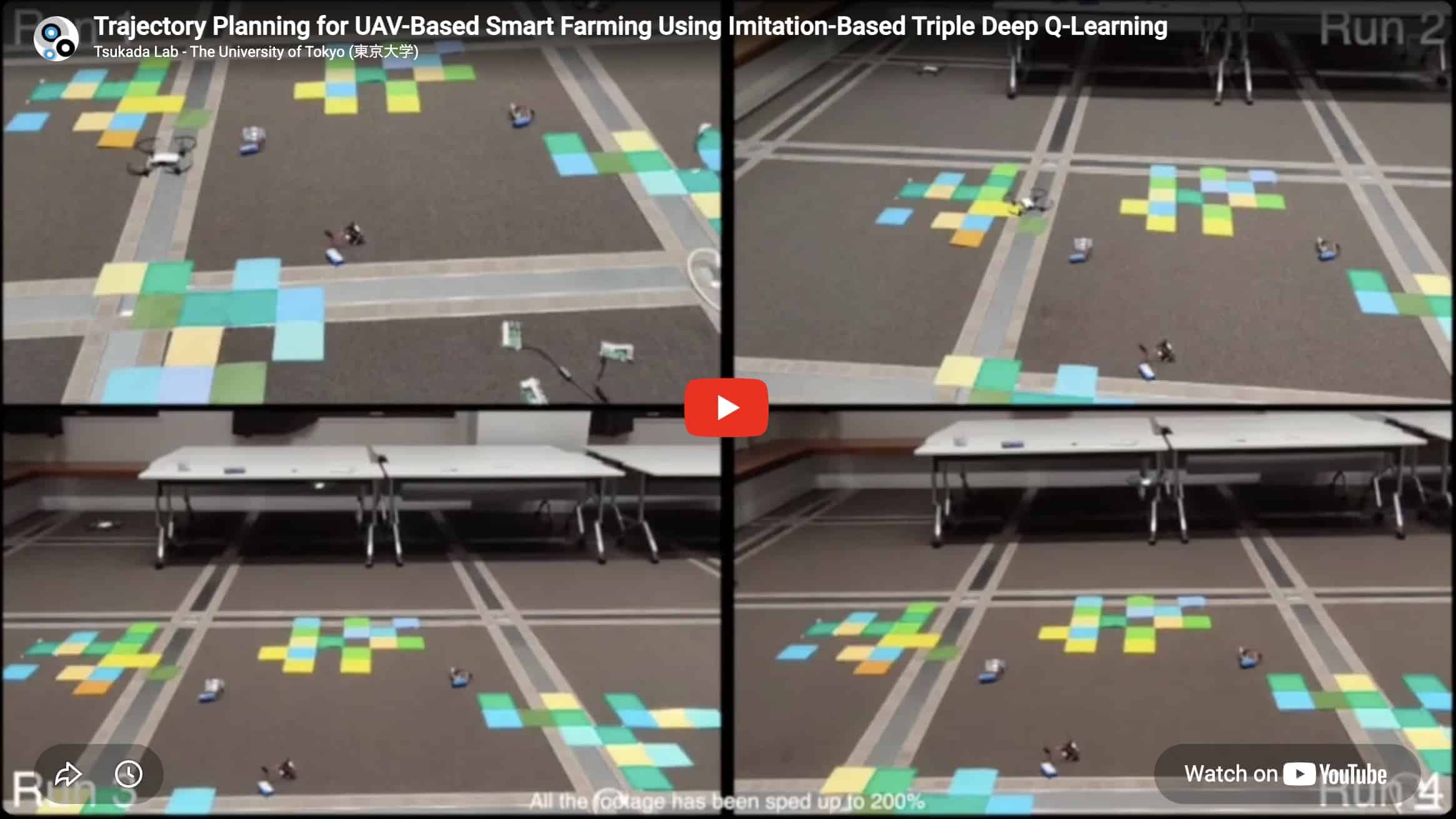
machine learning uav
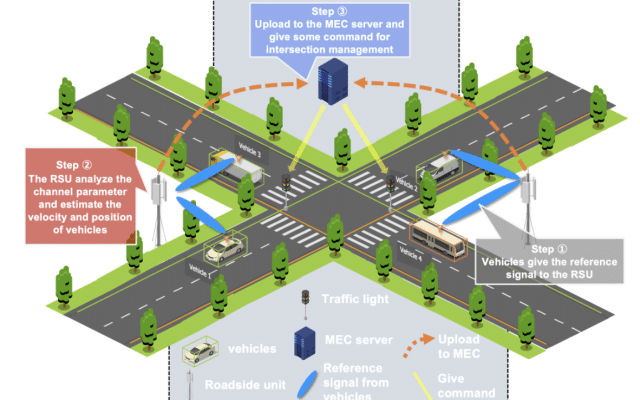
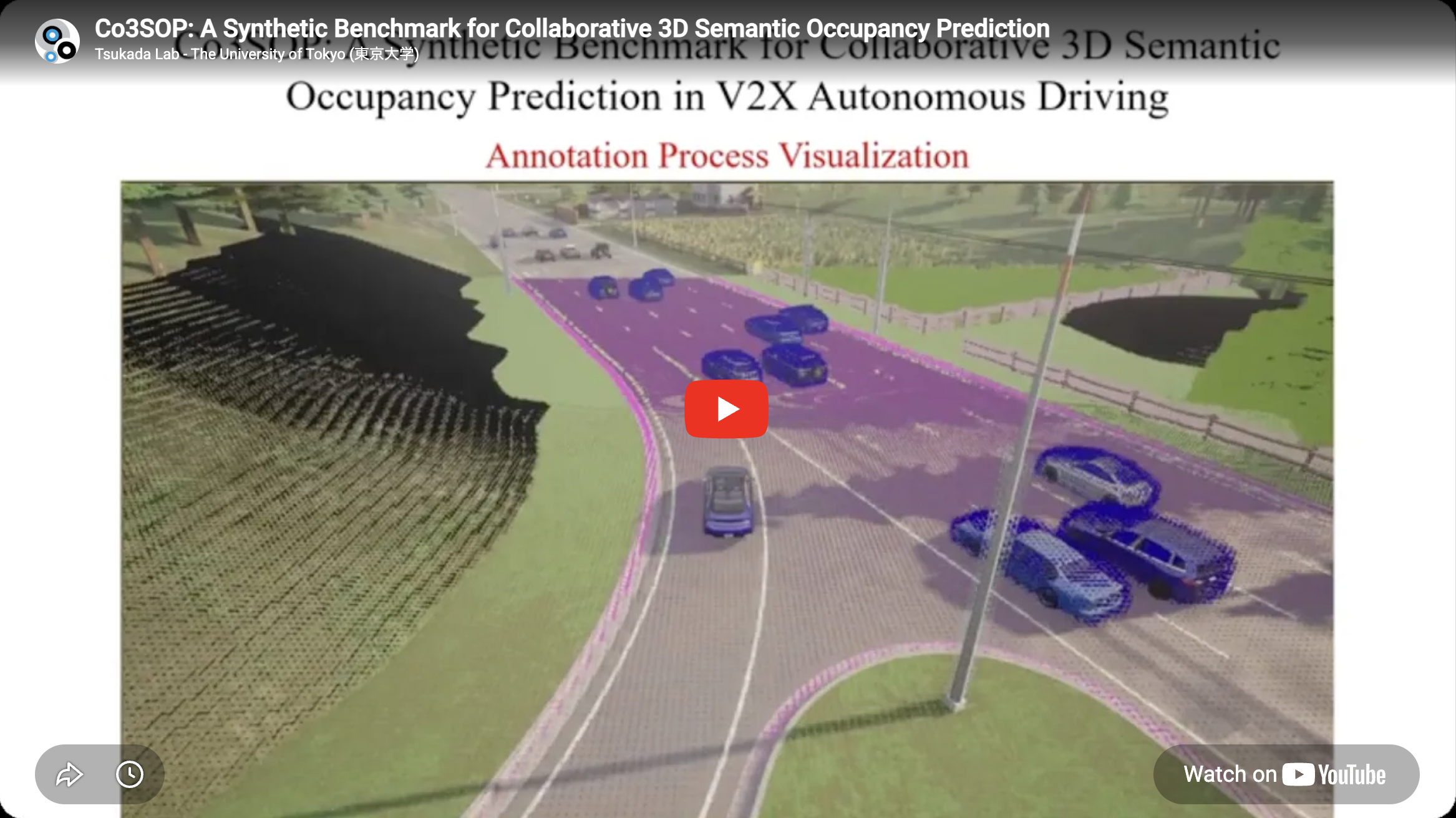
autonomous driving v2x

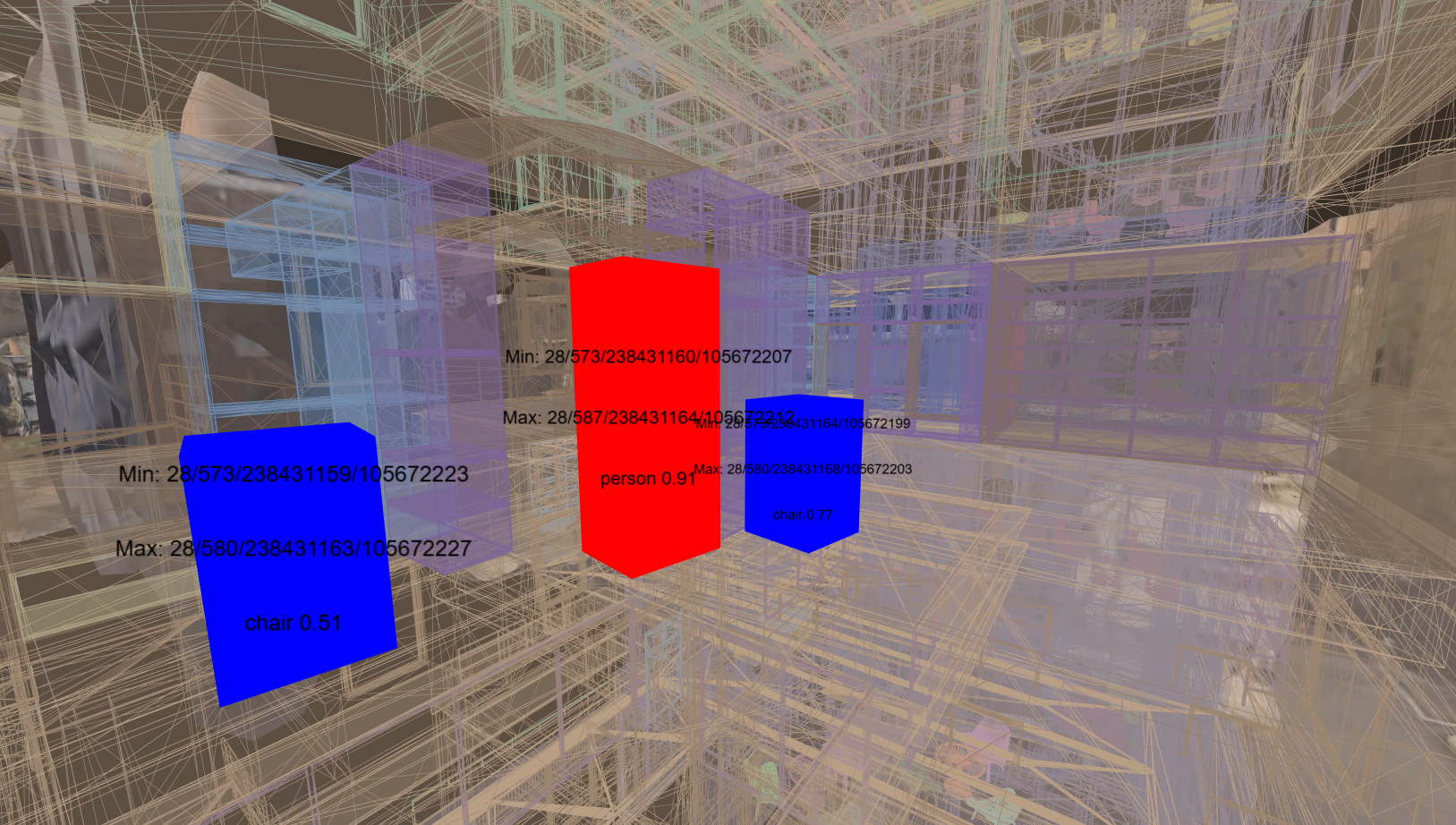
digital twins extended reality
digital twins uav

autonomous driving machine learning

machine learning v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}