0%

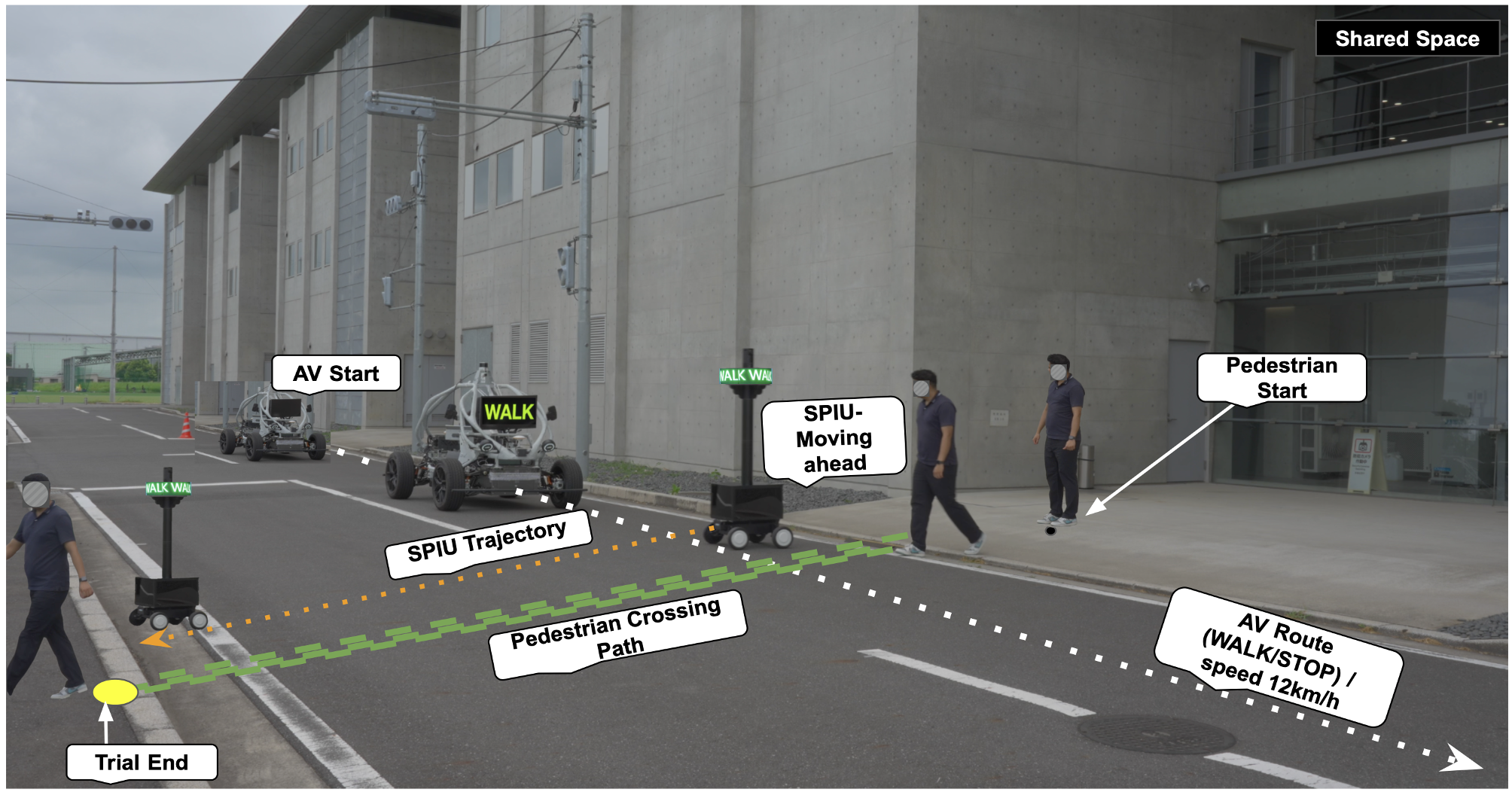







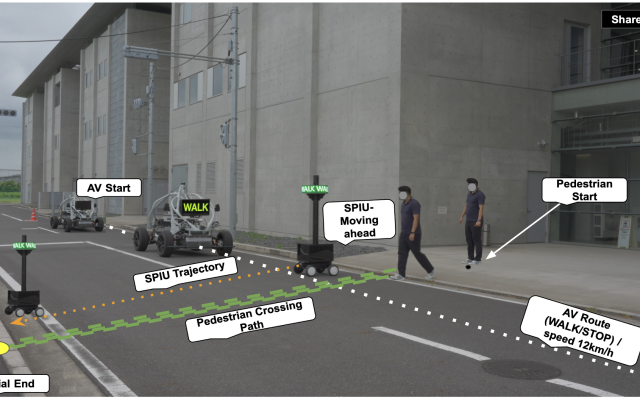
As autonomous vehicles move into pedestrian-centered urban spaces, communication becomes as important as perception and control. In shared spaces, pedestrians, cyclists, and vehicles negotiate movement informally, often without strong lane separation or conventional traffic signals. Once the human driver disappears, pedestrians lose the social cues they normally rely on, such as eye contact, gestures, and informal yielding behavior. This project addresses that communication gap through the Smart Pole Interaction Unit (SPIU), an infrastructure-side interface that works alongside vehicle-mounted eHMIs to provide synchronized pedestrian-facing signals near the point of interaction.
The project began with early concept development and validation. The 2023 IEEE WFIoT paper introduced the idea of using SPIU to ease pedestrian cognitive load in shared spaces, and the 2023 Electronics paper provided formal concept validation through immersive VR experiments. These early studies showed that when intent communication is shifted from a moving vehicle alone to a clear roadside mediator, pedestrians can interpret AV behavior more quickly and with less uncertainty. This established the central idea that shared-space communication should be organized around the negotiation region, not only around the vehicle.
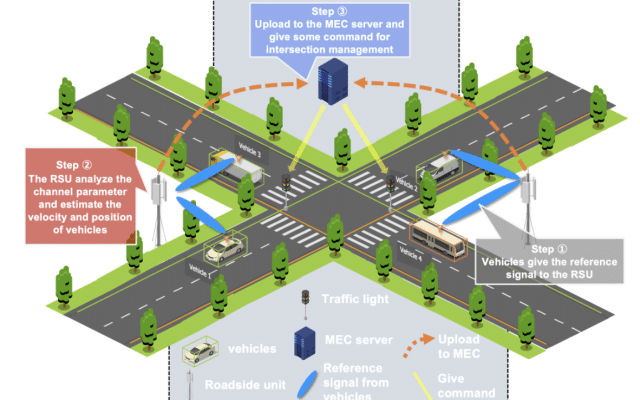
The next stage focused on what SPIU should actually communicate and how it should be designed. Through expert discussions, scenario sketches, and comparisons with multimodal LLM-generated proposals, the research mapped where human expectations and AI suggestions converged and diverged for safe pedestrian-AV interaction. This phase transformed SPIU from a simple signaling concept into a richer multimodal framework that can combine clear visual messages with complementary elements such as audio feedback, sensing, LiDAR, and V2X-based coordination. It also clarified an important design principle: SPIU is most valuable when it complements vehicle eHMI rather than replaces it.
Recent progress has extended the project beyond conceptual and lab-based studies into cross-cultural and real-world evaluation. In a VR-AWSIM framework developed in Japan and replicated in Norway, SPIU improved pedestrian decision-making across high-risk situations such as four-way intersections, blindspots, mixed traffic with delivery robots, and nighttime crossings. Most recently, a mobile SPIU prototype was built and evaluated in an outdoor shared-space study, where SPIU improved understandability, trust, and perceived safety, with the strongest results observed when SPIU and vehicle eHMI were used together. Together with related work on shared-space visual design, these studies position SPIU as a practical infrastructure-side interface for future pedestrian-AV ecosystems and point toward richer multimodal, accessible, and deployable communication in real cities.

autonomous driving machine learning
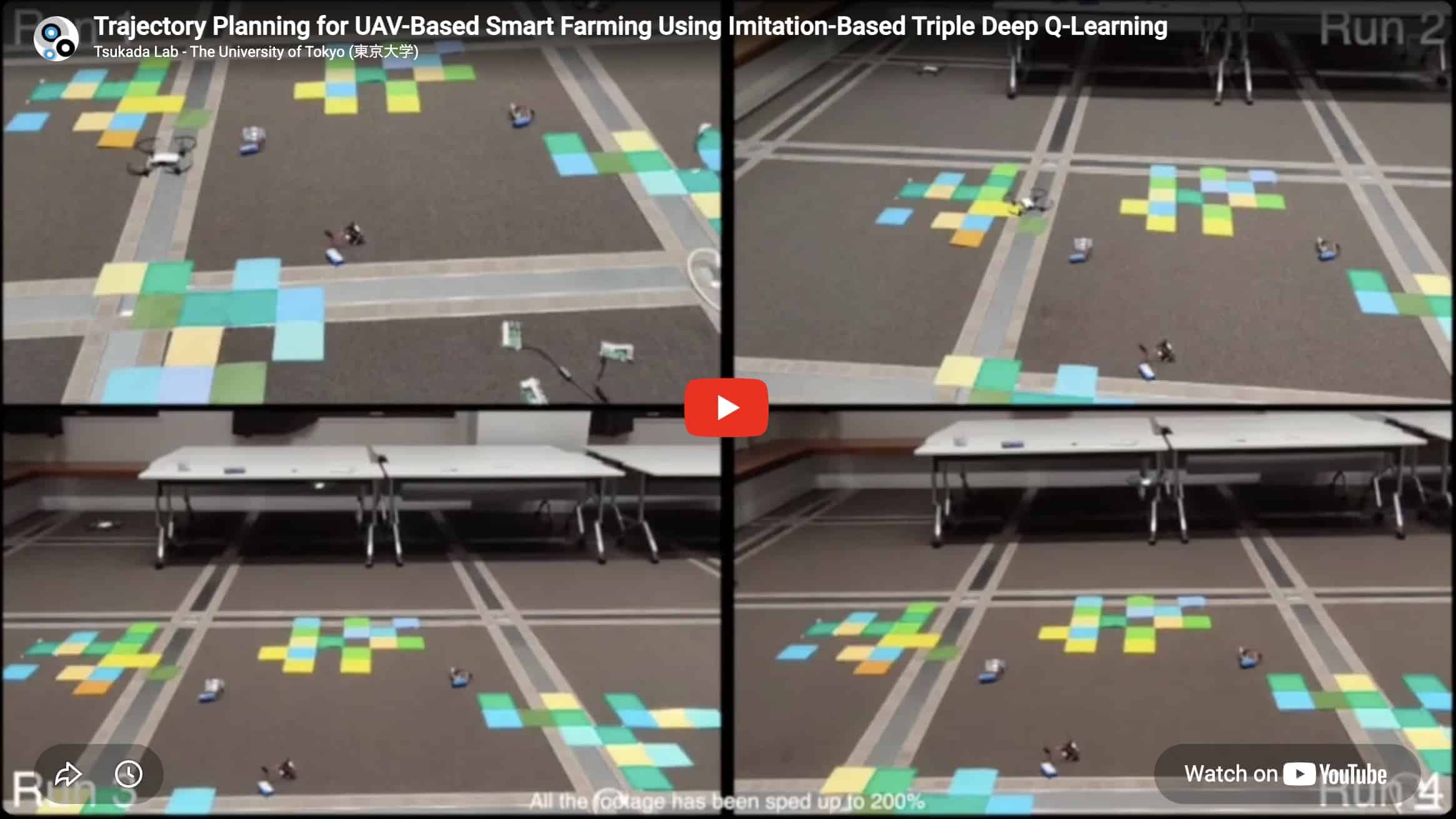
machine learning uav
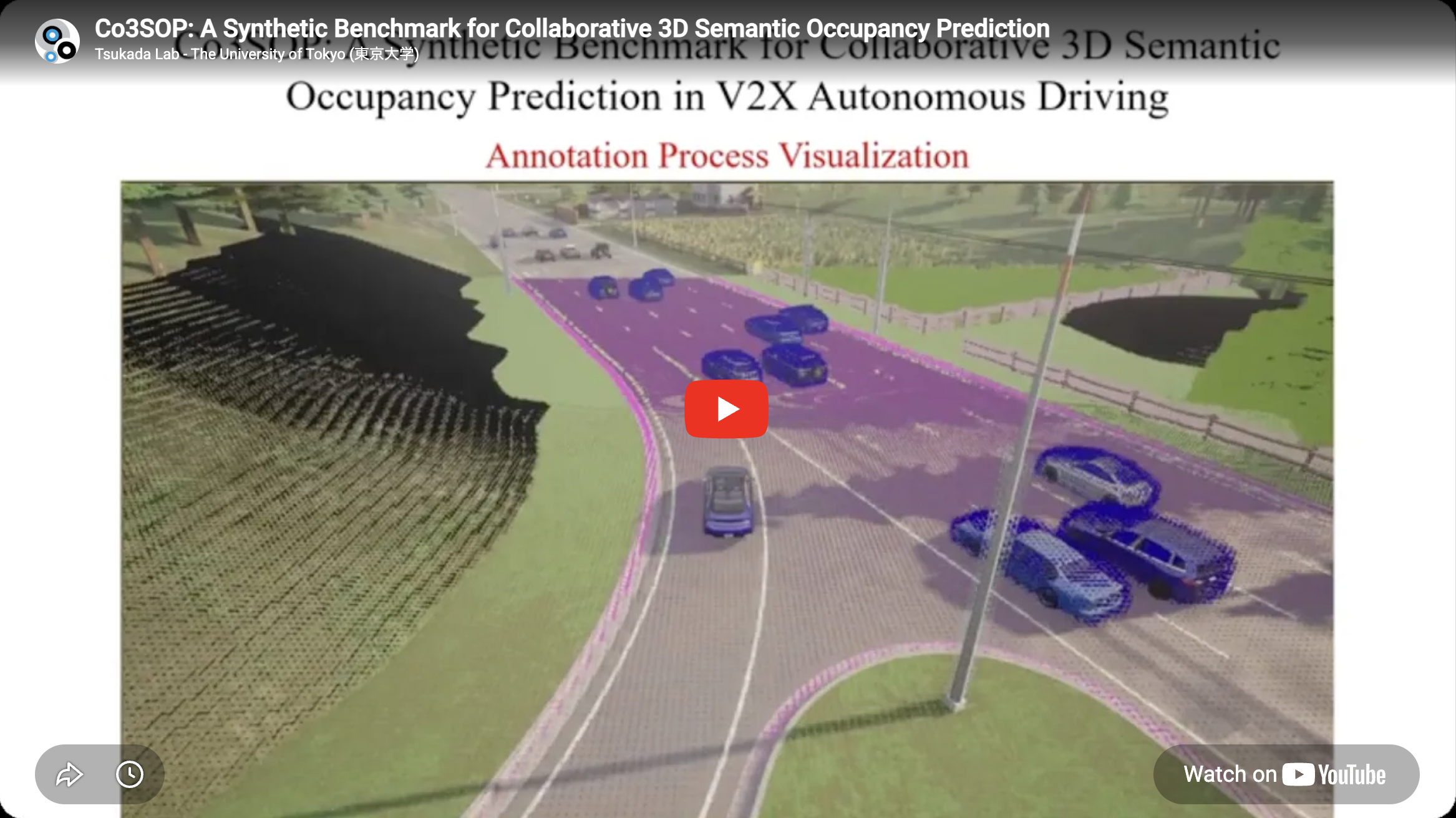
autonomous driving v2x
v2x

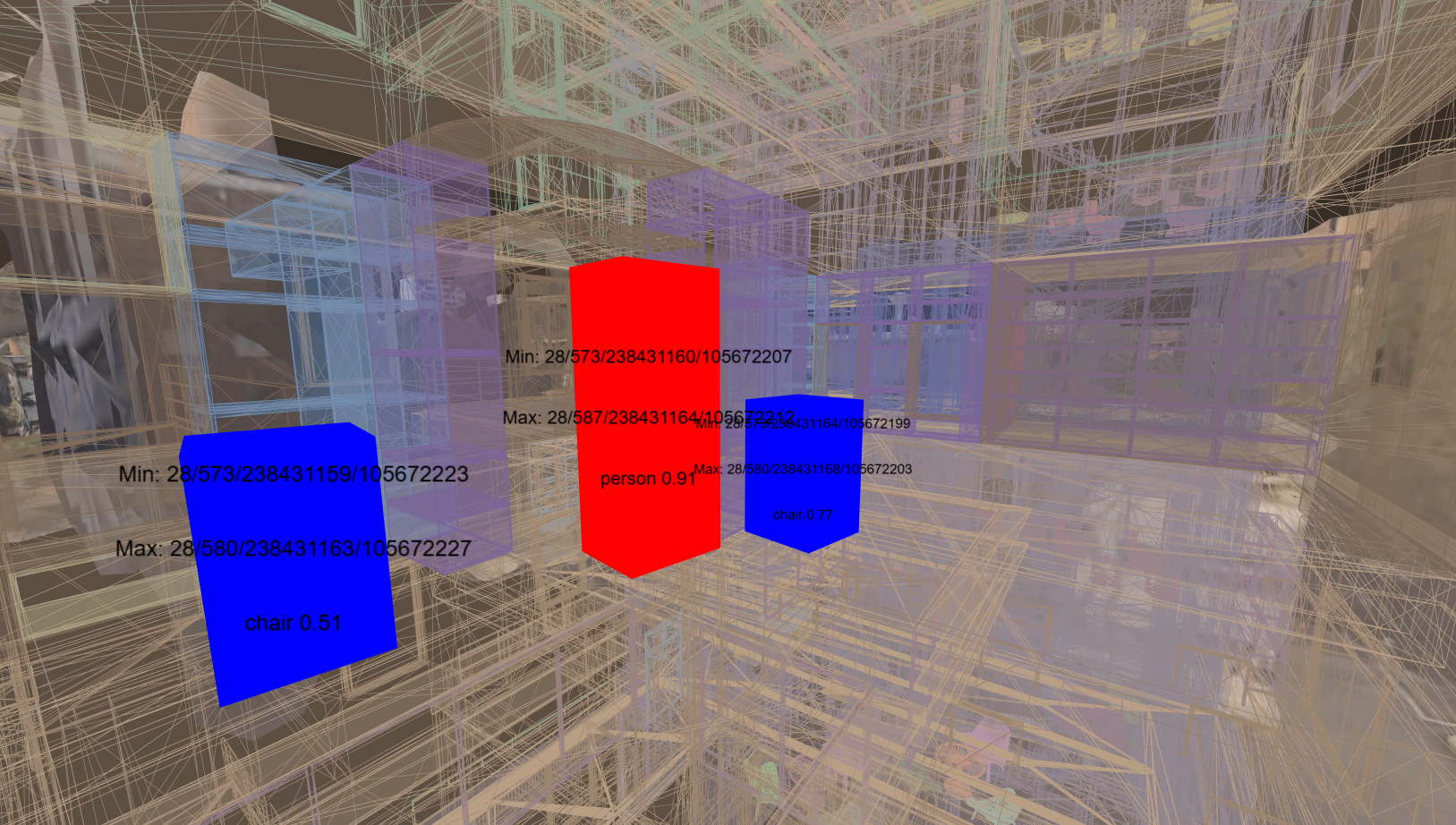
digital twins extended reality
digital twins uav

autonomous driving machine learning

machine learning v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}