0%

autonomous driving v2x
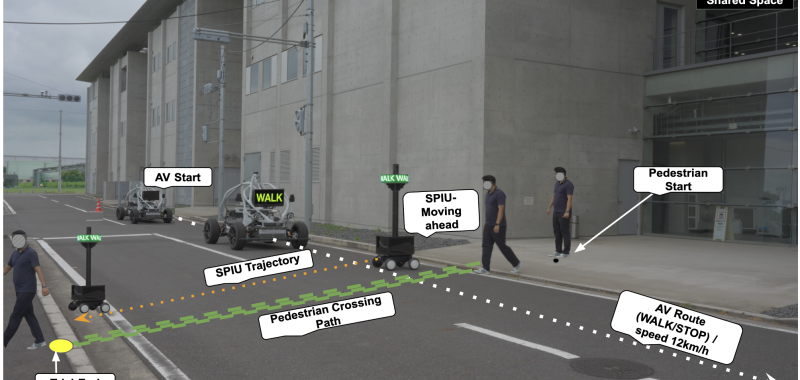
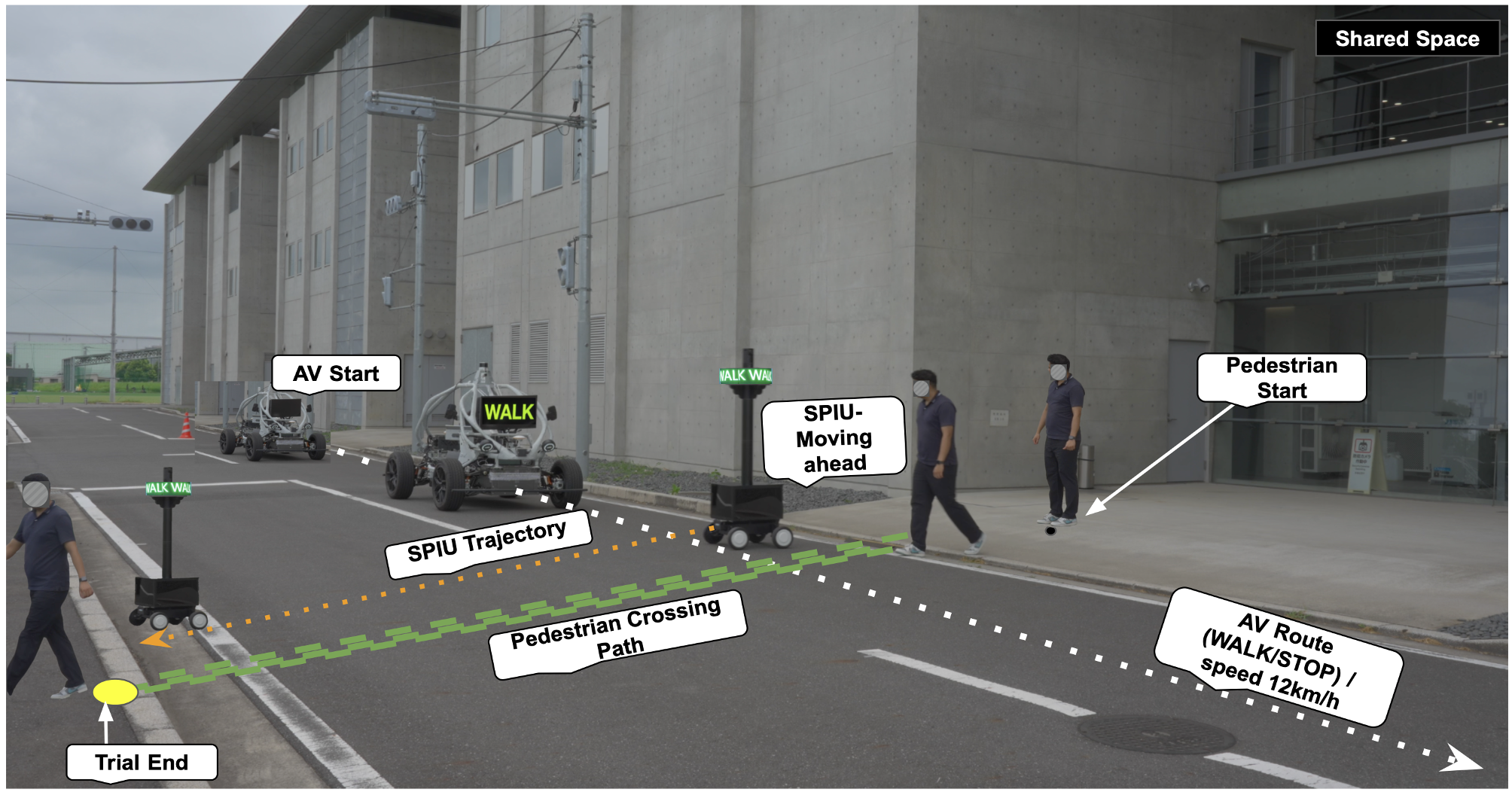
[2023 – 2026] Investigating the Smart Pole Interaction Unit (SPIU) as an infrastructure-side interface that complements vehicle eHMI to reduce pedestrian negotiation burden and support clearer, safer interaction with autonomous vehicles in shared spaces.
open source
v2x
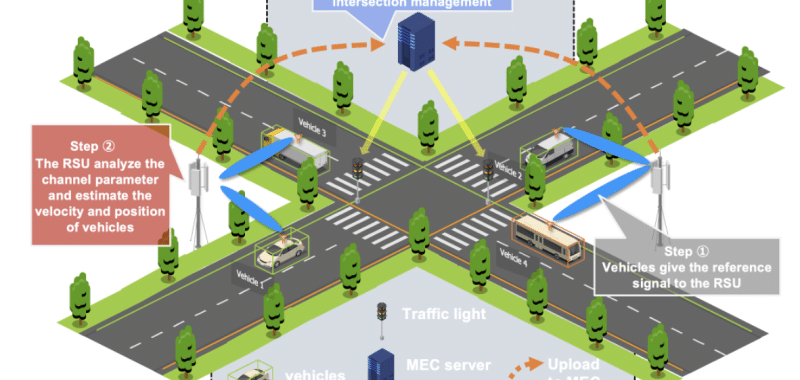
[2023 – 2026] Developing a robust, channel-adaptive vehicular localization and tracking system utilizing mmWave MIMO, RIS, and OTFS technologies for environments where GPS is unavailable.
digital twins extended reality
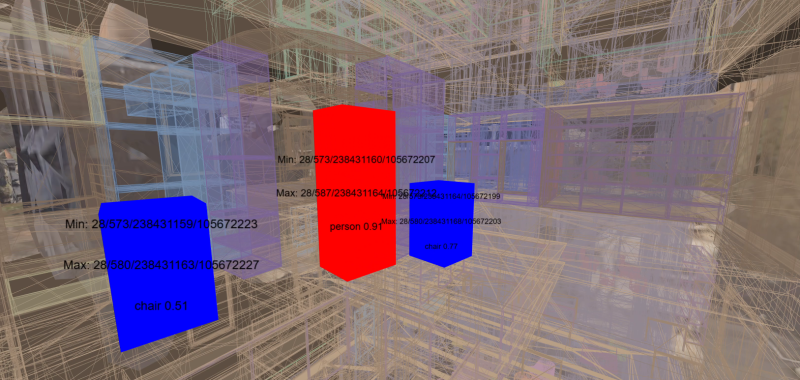
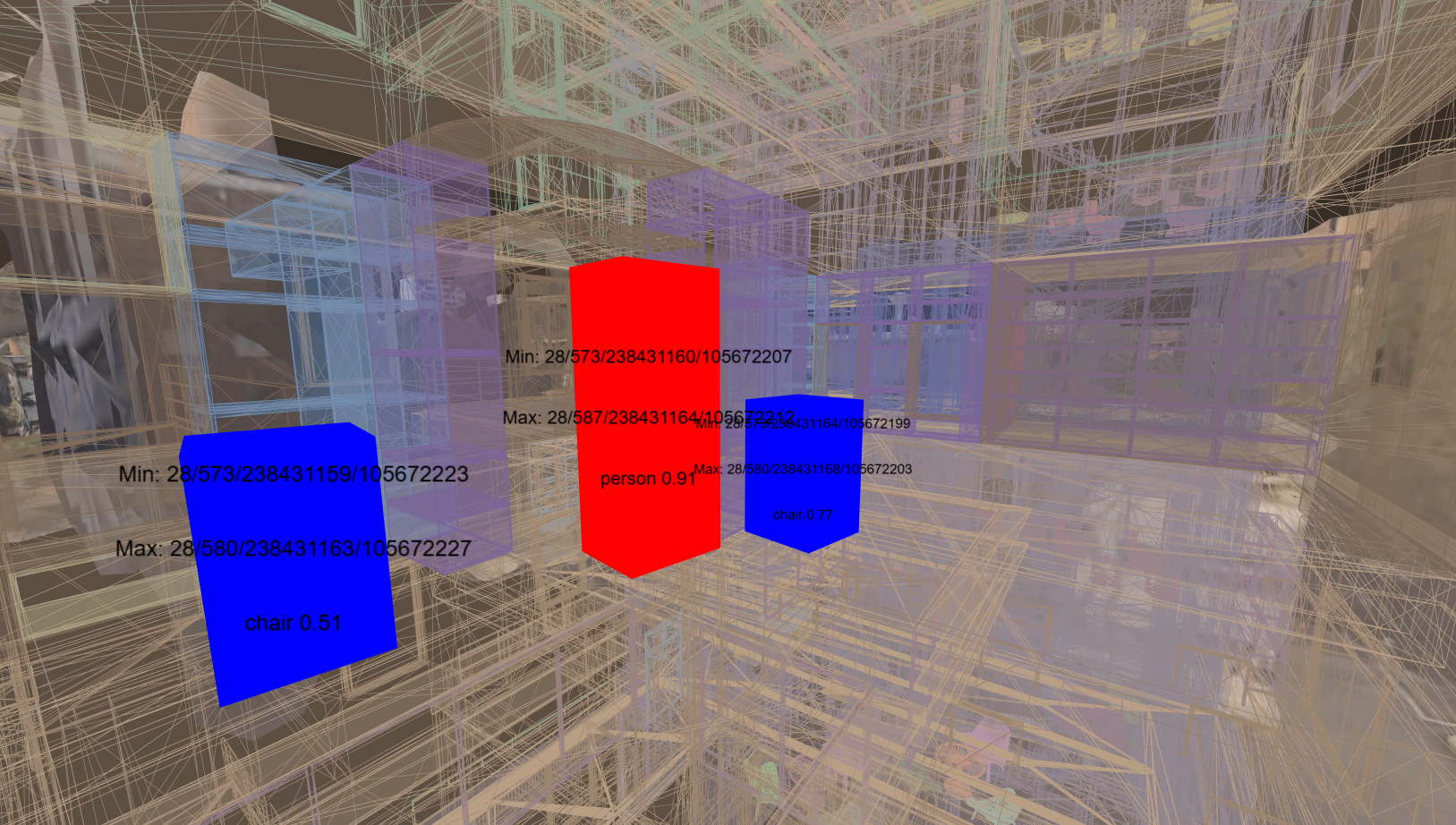
[2025 – 2028] Investigating Spatial ID as a standardized, multi-resolution spatial indexing layer that enables interoperable urban data systems, real-time querying, and large-scale spatial computing applications.
digital twins
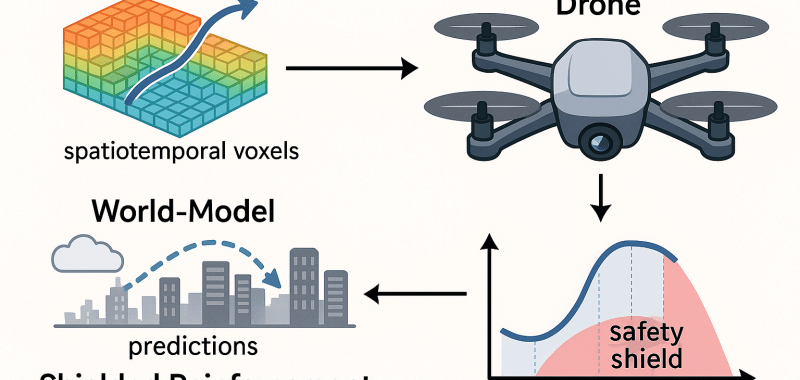
[2023 – 2025] This project seeks to establish a scientifically framework for Level-4 autonomous flight of unmanned aerial vehicles (UAVs). Unlike traditional methods limited to static, spatial path planning, this research integrates 4D spatiotemporal representations, predictive world-models, safety-constrained reinforcement learning, and GPS-independent Vision-Language(-Action) (VLM/VLA) modules. The resulting system aims to achieve safe, efficient, and flexible navigation in dynamic, uncertain environments while addressing regulatory certification requirements.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}