0%


")
")
")
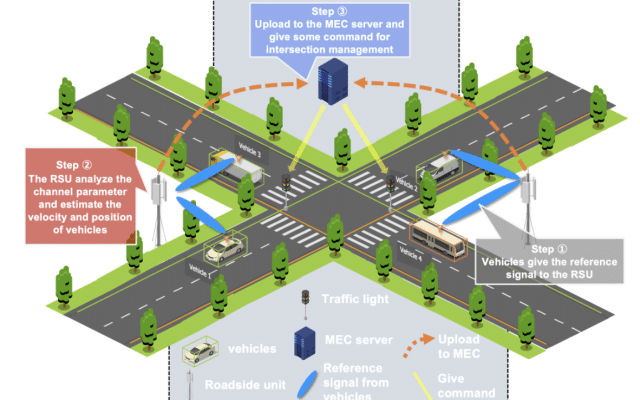
As autonomous driving and intelligent transportation systems (ITS) rapidly evolve, accurate vehicle localization has become a fundamental pillar for cooperative mobility and Vehicle-to-Everything (V2X) communications. While traditional GPS provides adequate positioning in open areas, its reliability drastically degrades in urban canyons, tunnels, and other non-line-of-sight (NLoS) environments. To address these limitations, our research project proposes a unified, GPS-free vehicular localization framework that leverages the rich physical-layer information of Beyond 5G/6G wireless communication channels. By integrating sensing and communication, this scalable infrastructure-assisted solution maintains high precision across blockage, high-mobility, and dense multi-user conditions.
For line-of-sight (LoS) environments, the project introduces a continuous tracking architecture based on millimeter-wave (mmWave) multi-antenna systems. We developed an adaptive, low-complexity 2D-MUSIC algorithm that efficiently extracts highly precise Direction-of-Arrival (DoA) and Time-of-Arrival (ToA) information. To overcome the instantaneous nature of geometric estimates, these spatial parameters are organically fused with vehicle motion dynamics using an Unscented Kalman Filter (UKF). This tightly coupled MUSIC-UKF approach effectively mitigates measurement noise and error accumulation, enabling stable, real-time trajectory and velocity estimation that is highly adaptable to complex road geometries like curves and intersections.
When direct LoS paths are obstructed, angle-based localization conventionally fails. To conquer this challenge, the framework transitions to an advanced sensing strategy integrating Reconfigurable Intelligent Surfaces (RIS) and Orthogonal Time Frequency Space (OTFS) modulation. The strategically deployed RIS reconstructs controllable virtual propagation paths around obstacles, restoring channel observability. Concurrently, the OTFS modulation, enhanced by a novel low Peak-to-Average Power Ratio (PAPR) pilot design, expertly resolves severe Doppler shifts and multipath fading typical of high-speed vehicular mobility. A dual-branch velocity estimation method utilizing the UKF further guarantees tracking resilience under these harsh NLoS conditions.
Finally, to ensure scalability for dense, real-world traffic scenarios, the framework is extended to support multi-user coexistence. It features an interference-aware iterative successive interference cancellation (SIC) scheme based on a page-style frame structure to efficiently separate overlapping user signals. Additionally, it employs an adaptive DoA estimation mechanism that dynamically selects the optimal processing mode—switching between Root-MUSIC for low-noise conditions and Forward-Backward Spatial Smoothing (FBSS) for high-interference regimes. Ultimately, this comprehensive research bridges classical array-signal processing with cutting-edge waveform design, laying a robust and reliable foundation for the cooperative perception required by future autonomous mobility networks.
v2x

digital twins extended reality

digital twins

autonomous driving machine learning

machine learning v2x

autonomous driving v2x

extended reality

v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}