0%



This project aims to enhance the Autoware autonomous driving software by integrating cooperative driving capabilities using vehicle-to-everything (V2X) communication. Instead of relying solely on onboard perception, our extensions allow autonomous vehicles to interact with each other and with roadside infrastructure, making driving behavior safer and more efficient in complex traffic scenarios.
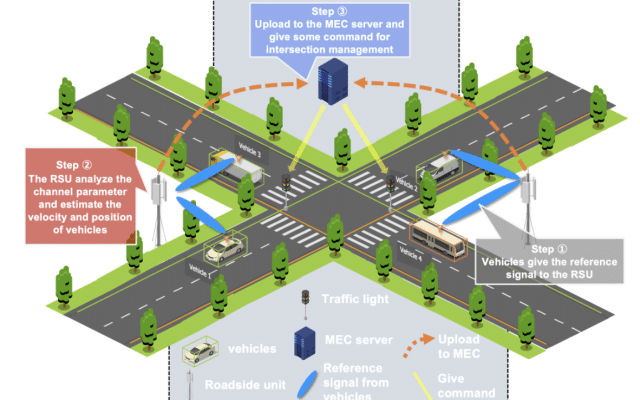
The first major milestone was the development of AutowareV2X, a communication module that enables the exchange of Collective Perception Messages (CPMs). This allows vehicles to share object-level sensor data, effectively extending their field of view by leveraging information from other connected vehicles and infrastructure. Real-world experiments using actual vehicles confirmed that the system achieved reliable data sharing with low end-to-end latency around 30 milliseconds.
To improve reliability under unstable wireless conditions, we implemented a dual-channel hybrid delivery mechanism for CPMs, along with a real-time monitoring system for communication quality. This enabled dynamic selection of the freshest CPM among different wireless links, ensuring consistent and trustworthy data delivery even under packet loss conditions.
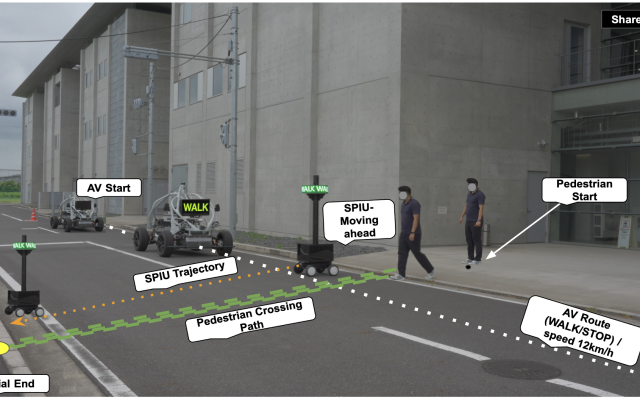
Beyond perception, we extended Autoware’s planning capabilities to support cooperative maneuver coordination. Vehicles can now share their future paths and dynamically adjust their behaviors based on potential conflicts or optimization opportunities, such as avoiding collisions or reducing travel time at intersections. Using the AutoMCM protocol, which defines seven abstracted coordination messages, we achieved efficient, event-driven communication with reduced bandwidth and strong robustness. Experiments showed that our system could reduce travel time by up to 28% compared to standalone driving, laying the groundwork for deployable cooperative driving systems.

autonomous driving machine learning
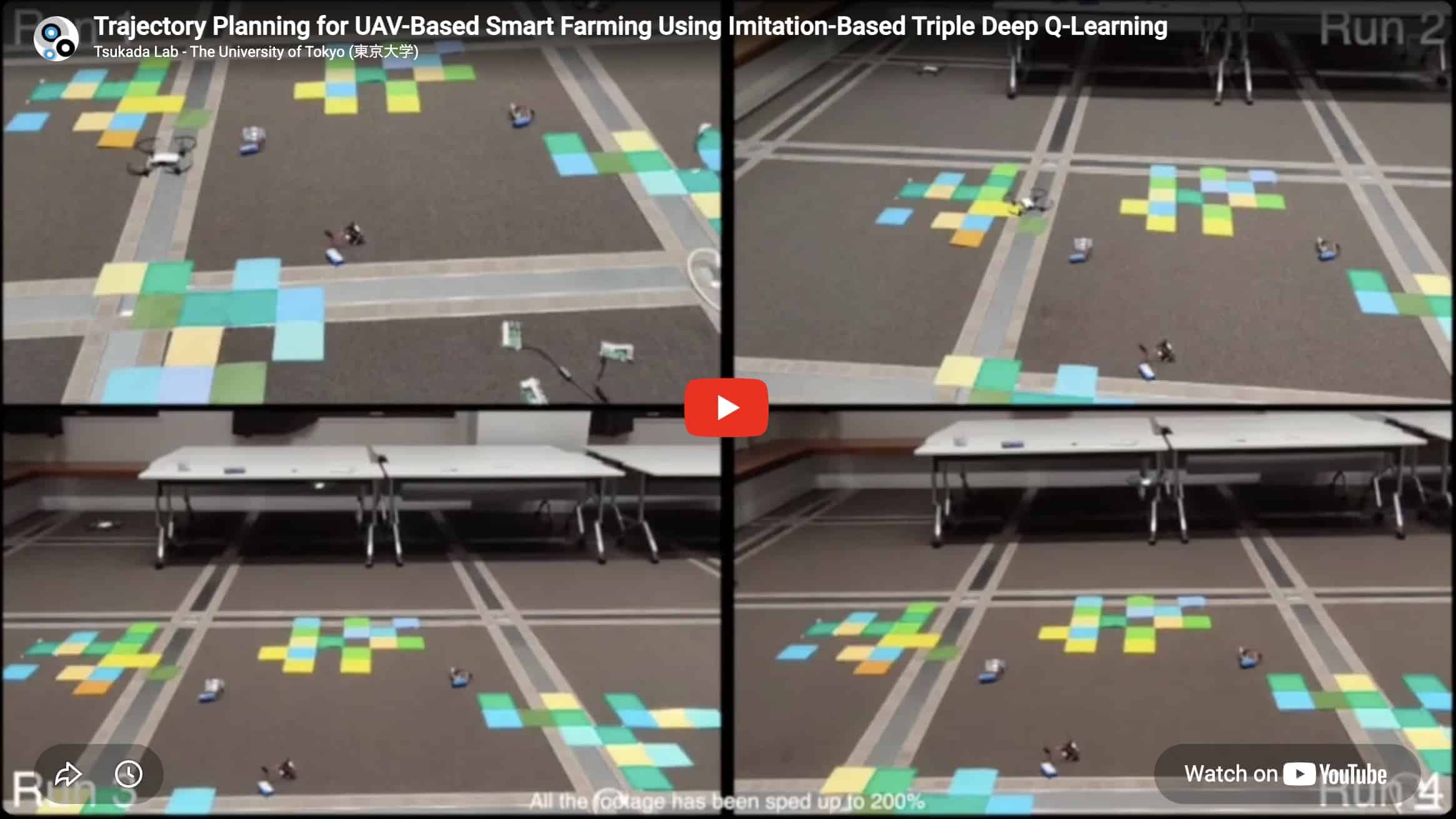
machine learning uav
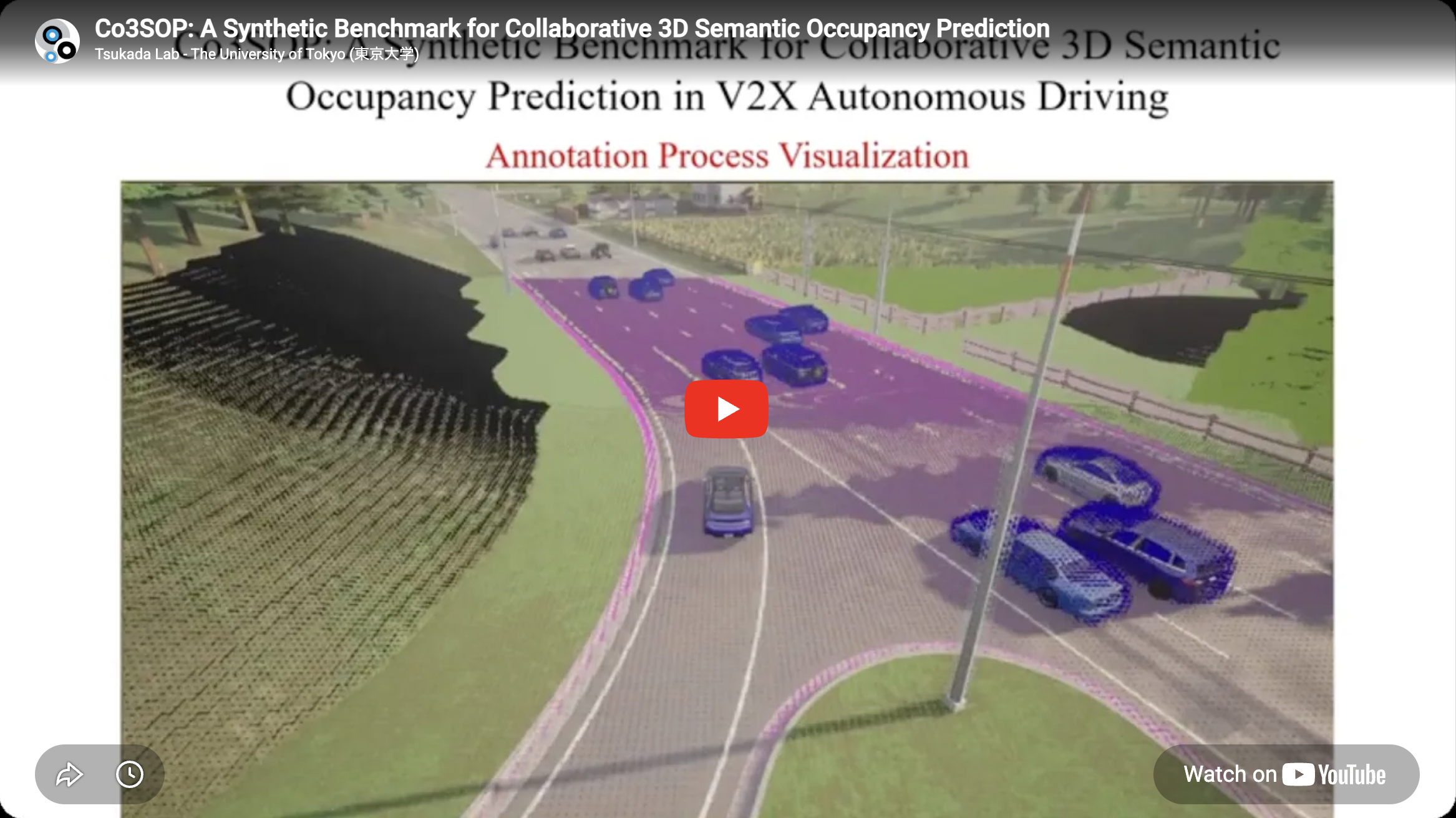
autonomous driving v2x
v2x

digital twins extended reality
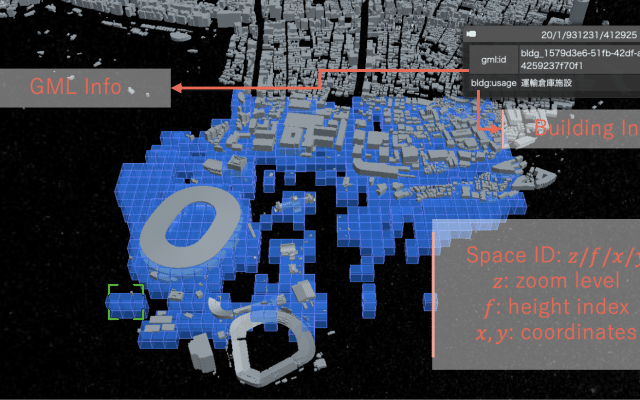
digital twins uav

autonomous driving machine learning

machine learning v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}