0%


open source
v2x
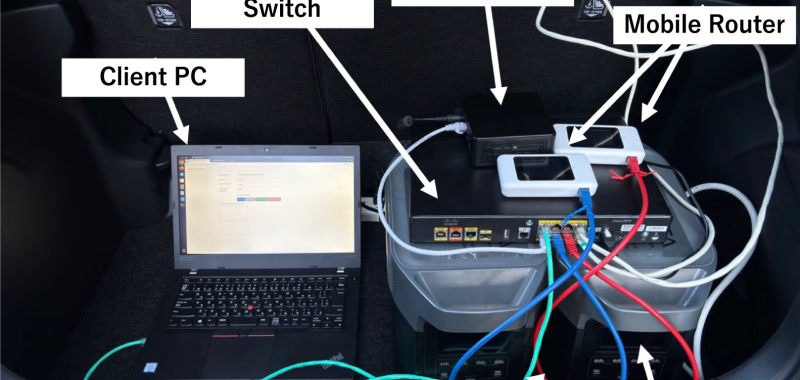
[2023 – 2025] Developing a multipath framework to improve real-time media quality under fluctuating 5G network conditions by leveraging multiple mobile connections simultaneously.
machine learning v2x
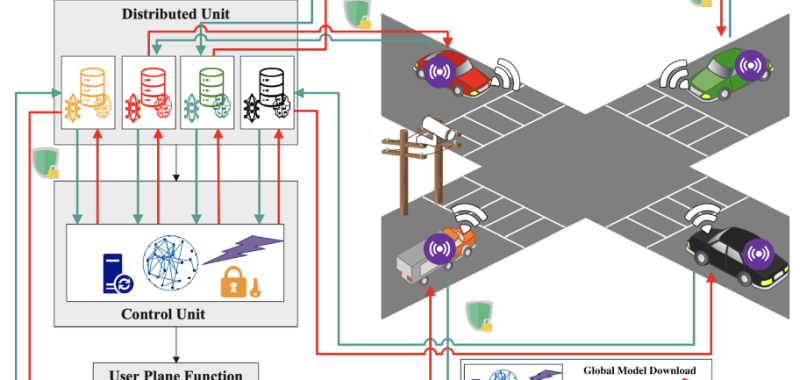
[2023 – 2025] Building a federated learning-based architecture for efficient and secure communication and intelligence in connected autonomous vehicles.
open source
open source
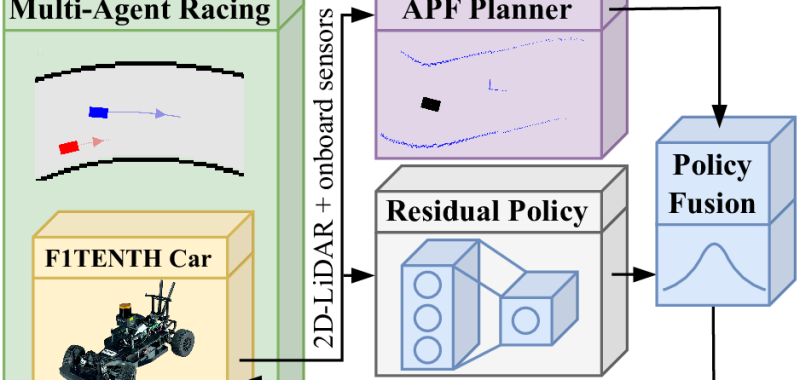
Trumpp, Raphael, Javanmardi, Ehsan, Nakazato, Jin, Tsukada, Manabu, Caccamo, Marco, “RaceMOP: Mapless Online Path Planning for Multi-Agent Autonomous Racing using Residual Policy Learning”, In: The 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), Abu Dhabi ,UAE, 2024.Proceedings Article | Abstract | Links | BibTeX@inproceedings{Trumpp2024, title = {RaceMOP: Mapless Online Path Planning for Multi-Agent Autonomous Racing using Residual Policy Learning}, author = {Raphael Trumpp and Ehsan Javanmardi and Jin Nakazato and Manabu Tsukada and Marco Caccamo}, url = {http://github.com/raphajaner/racemop}, doi = {10.1109/IROS58592.2024.10801657}, year = {2024}, date = {2024-09-14}, urldate = {2024-09-14}, booktitle = {The 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024)}, address = {Abu
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}