0%






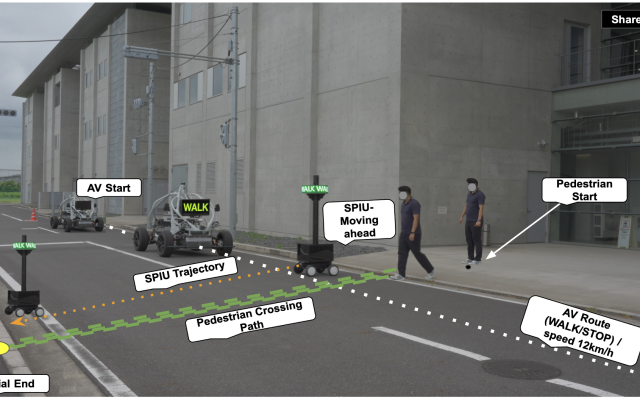
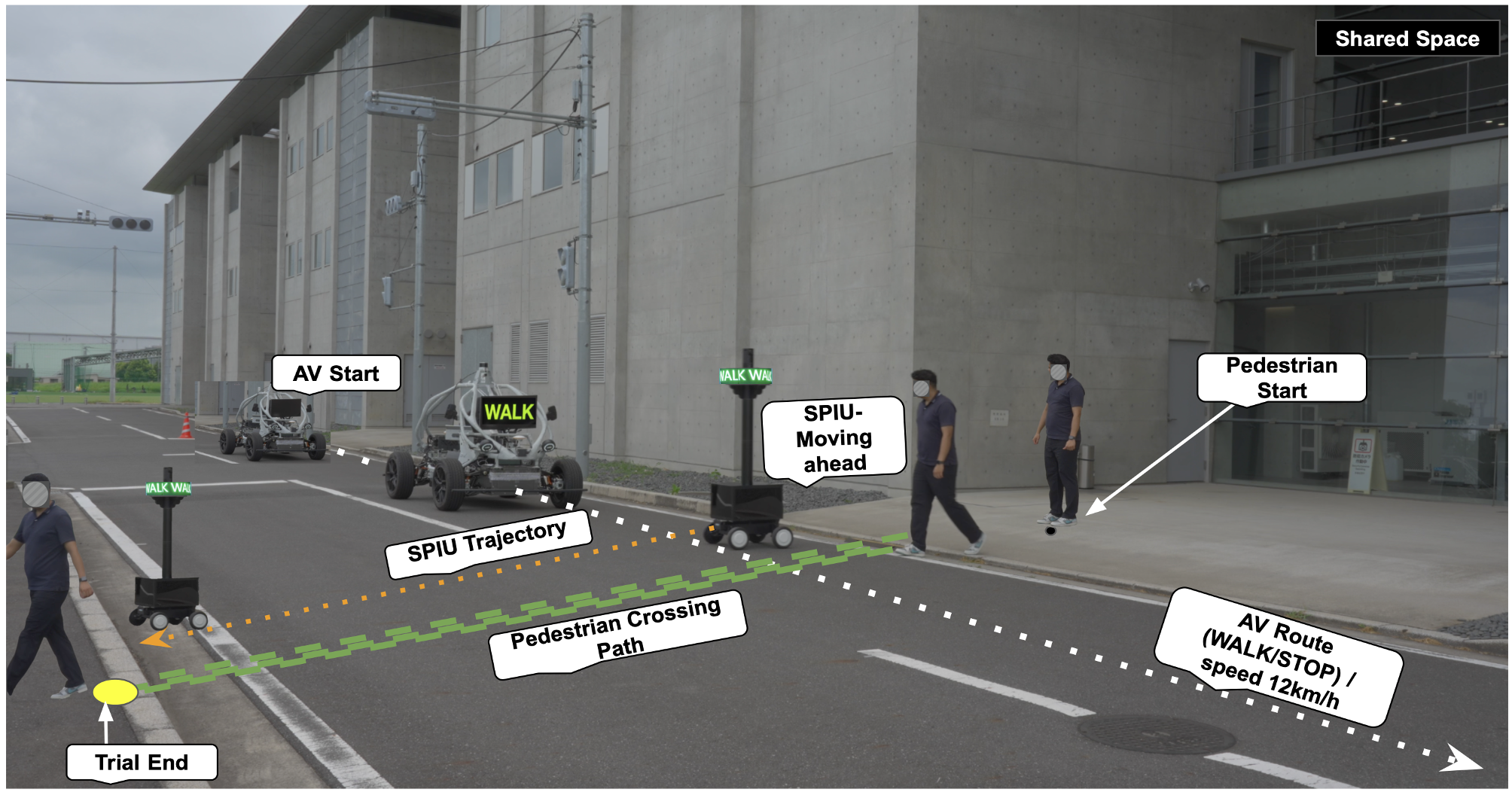
自動運転技術の発展に伴い、車両だけでなくインフラ側にも知覚能力と通信能力を持たせる「協調認識(Cooperative Perception)」の重要性が高まっています。特に、死角に存在する歩行者や非コネクテッド車両の検出、混合交通環境への対応など、インフラによる支援は交通安全の要となります。本研究では、センサと通信機能を統合した路側知覚ユニット(Roadside Perception Unit: RSPU)を開発し、インフラベースの協調認識を実現するためのシステム設計と評価を行ってきました。
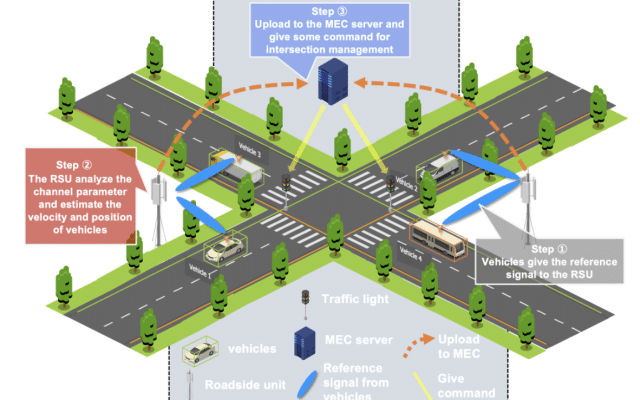
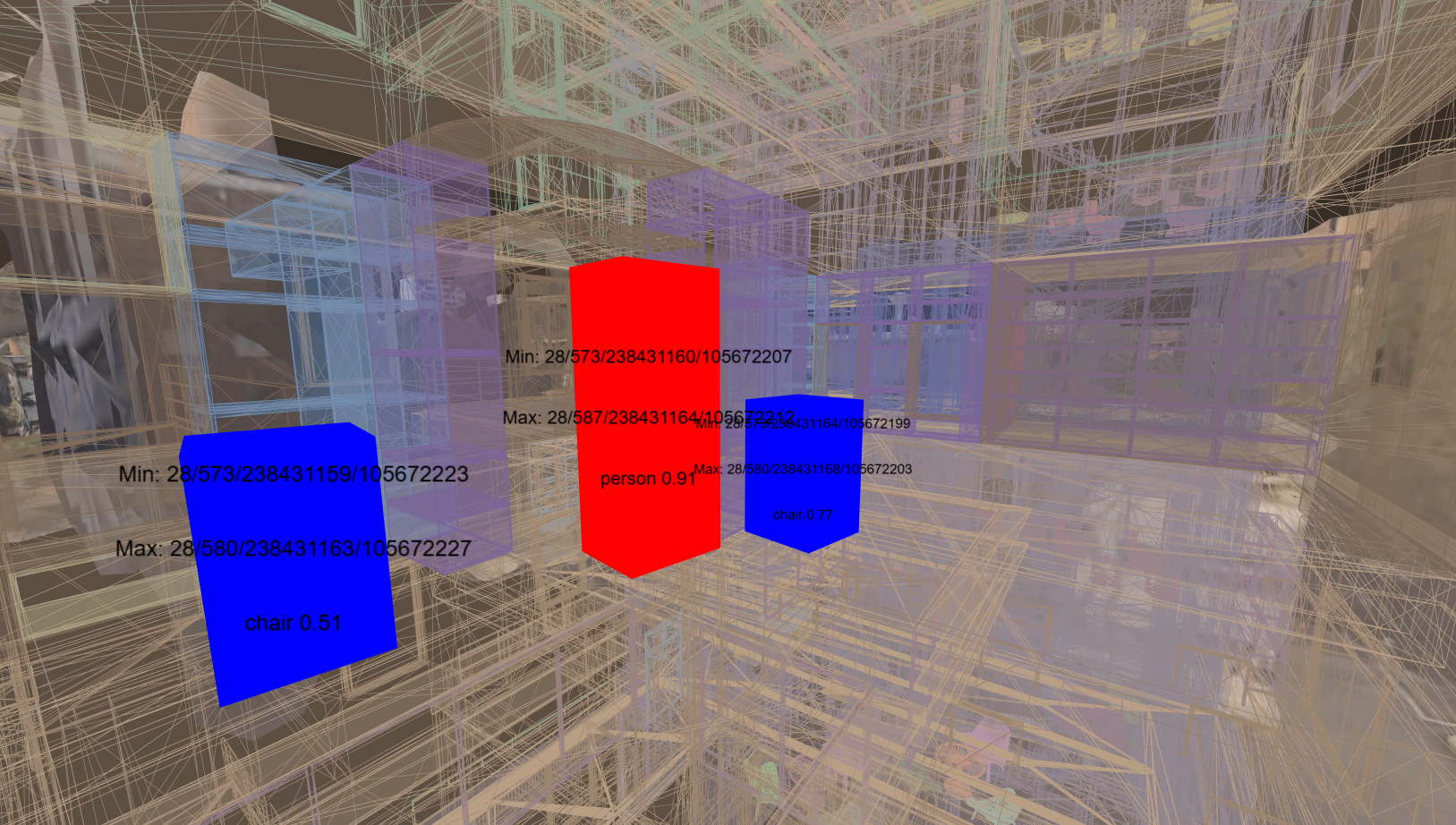
RSPUは、LiDARやカメラ、レーダーなどを搭載し、周囲の交通状況をリアルタイムで把握しながら、車両に対して協調認識メッセージを生成・配信する機能を持ちます。さらに、複数のRSPUを有線ネットワークで接続する「ネットワーク型RSPU」構成を提案し、道路全体を一つのセンサネットワークとして機能させることで、広域かつ高精度な認識が可能になります。これにより、個々の車両では不可能な情報の取得と伝達が実現します。
提案したRSPUシステムは、フィールド実験・数値解析・ネットワークシミュレーションにより性能評価されました。特に、提案した優先度制御アルゴリズムを用いることで、通信混雑時にも遅延を抑えつつ、重要度の高い情報を優先的に配信することが可能であることが確認されました。また、実車試験においても、協調認識メッセージを最悪条件でも100ミリ秒以内で車両に届けることに成功しています。
これらの研究成果は、「AutoC2X」としてオープンソースで公開されており、開発者・研究者による試作や実装、都市部への応用展開を後押ししています。今後は、エッジコンピューティングとの連携や、次世代ITS(Intelligent Transport Systems)との統合により、RSPUを中心としたインフラ主導の高度協調型交通インフラの実現を目指します。
autonomous driving v2x

digital twins extended reality

digital twins

autonomous driving machine learning

machine learning v2x

autonomous driving v2x

extended reality
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}