0%






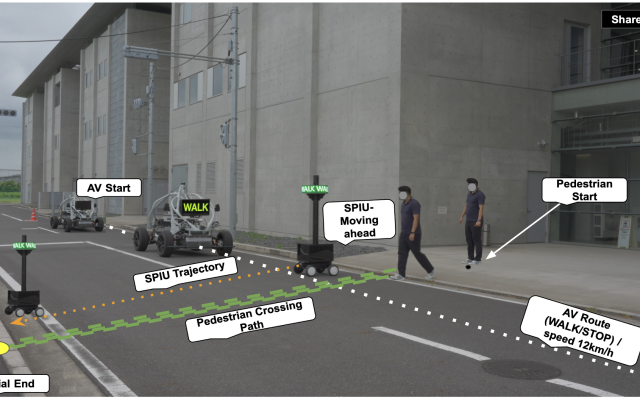
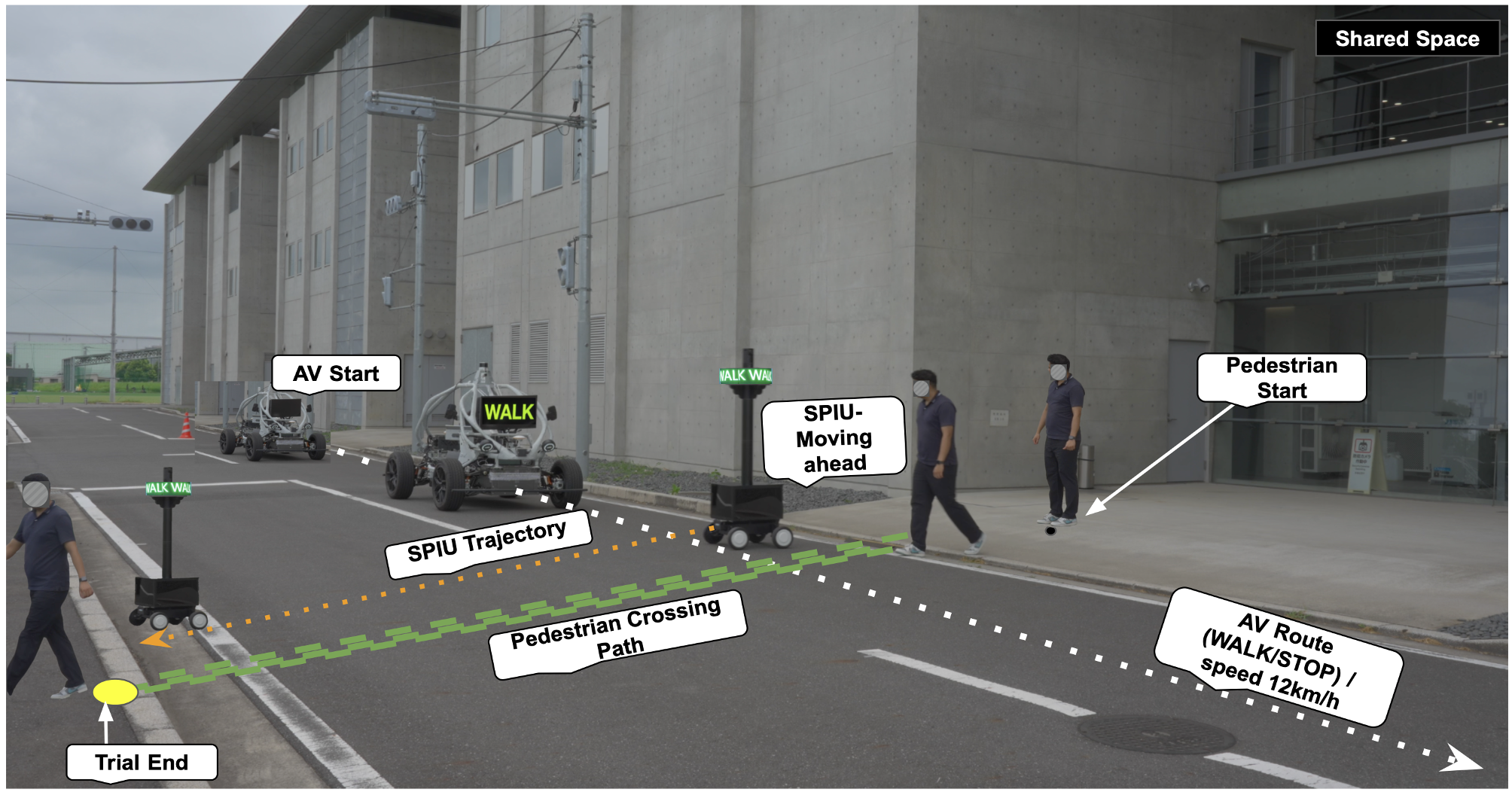
As autonomous driving technologies evolve, the importance of infrastructure-based sensing and communication is growing rapidly. Cooperative perception, which allows sharing of sensor data among vehicles and infrastructure, is especially crucial for detecting vulnerable road users and handling mixed traffic environments. In this project, we developed Roadside Perception Units (RSPUs), which combine sensing and communication capabilities to support autonomous vehicles from the roadside. Our goal is to enable a robust and scalable infrastructure-led cooperative perception system.
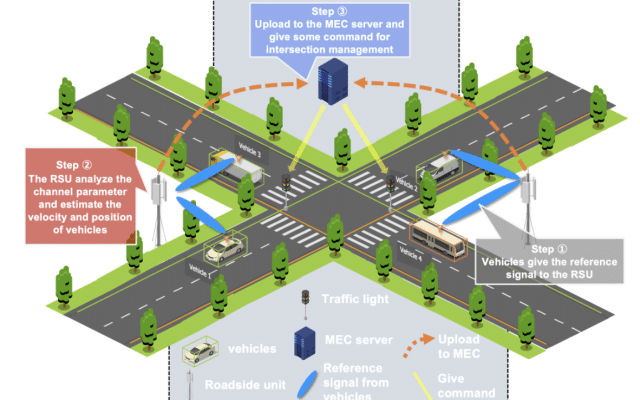
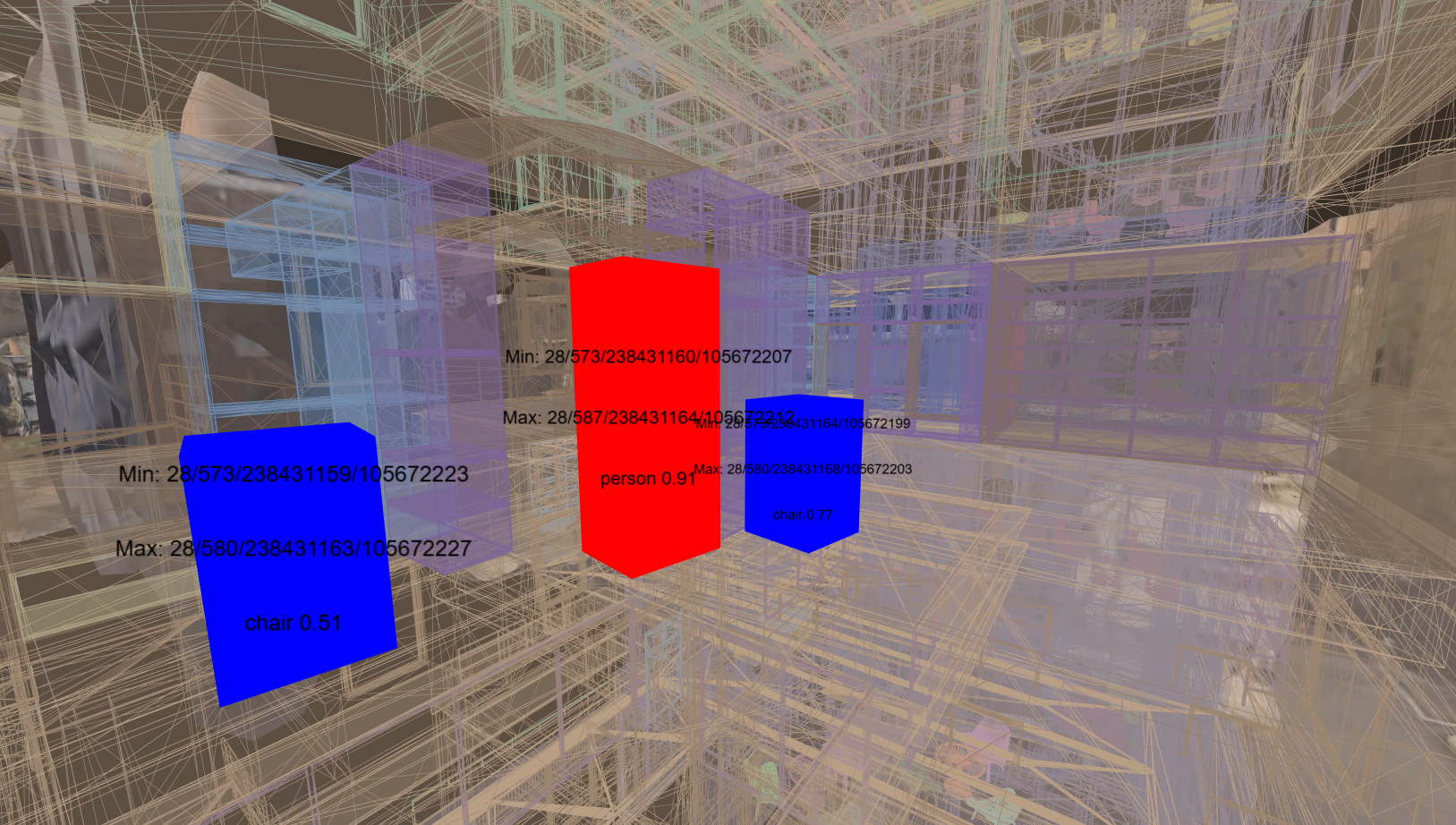
Each RSPU is equipped with sensors such as LiDAR, cameras, and radar, and is capable of analyzing the surrounding traffic environment in real time. These units generate and transmit cooperative perception messages to nearby vehicles. To extend coverage, we introduced the concept of “networked RSPUs,” where multiple RSPUs are connected via wired infrastructure networks. This architecture transforms the road itself into a distributed sensor network, enabling large-scale environmental awareness that goes beyond the capability of individual vehicles.
We evaluated the proposed RSPU system through field experiments, simulations, and numerical analysis. A key contribution is our priority-based communication algorithm, which ensures low latency and high delivery rates, even under heavy traffic conditions. Field tests showed that the system can reliably transmit cooperative perception messages to vehicles within 100 milliseconds, meeting real-time requirements for safety-critical applications.
The RSPU platform and supporting software, collectively named “AutoC2X,” have been released as open-source, accelerating community-based development and real-world deployment. Looking ahead, we aim to integrate edge computing and expand to smart city-scale ITS infrastructure, where RSPUs act as a foundation for future-ready, cooperative, and intelligent transport networks.

autonomous driving machine learning
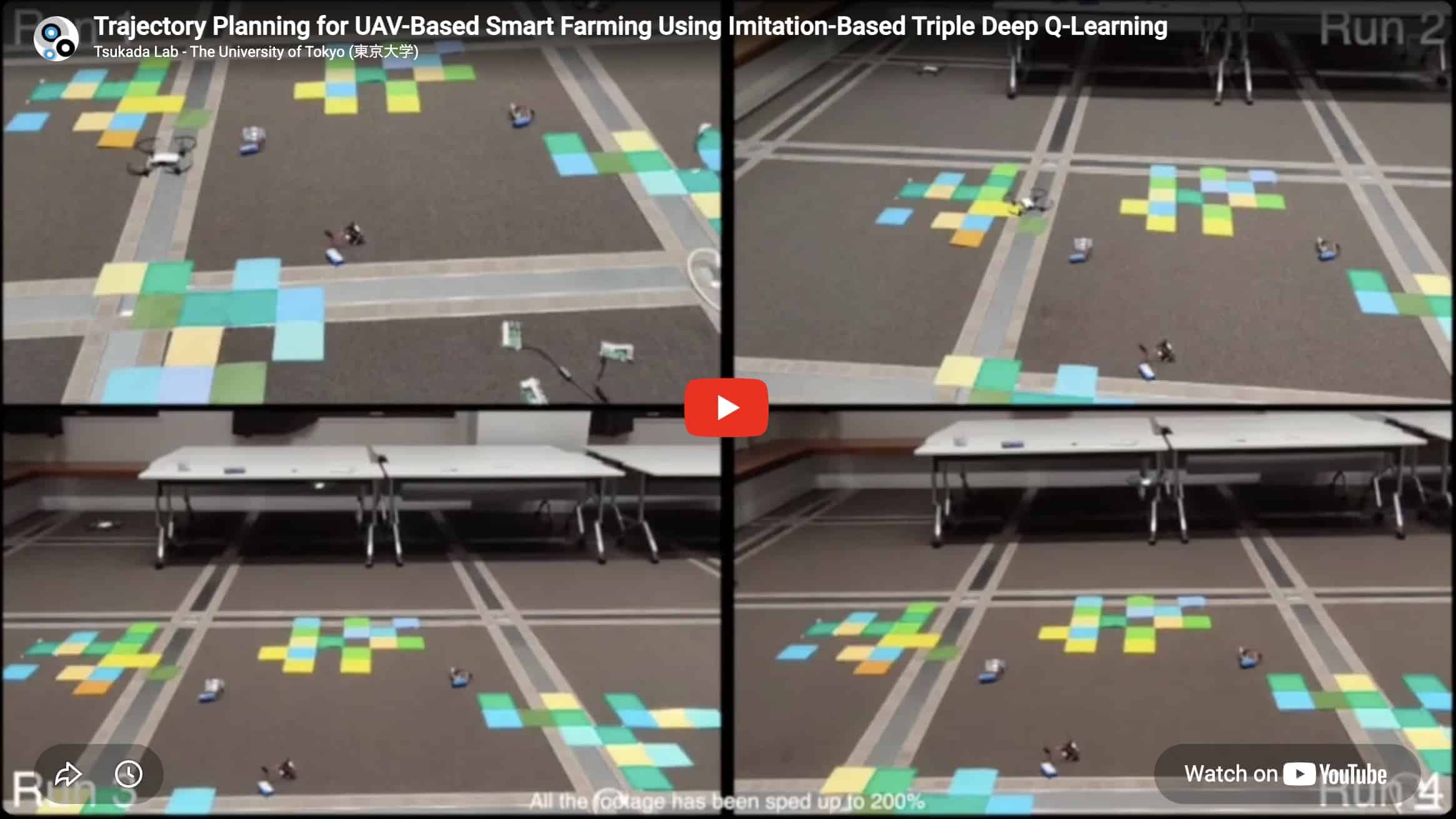
machine learning uav
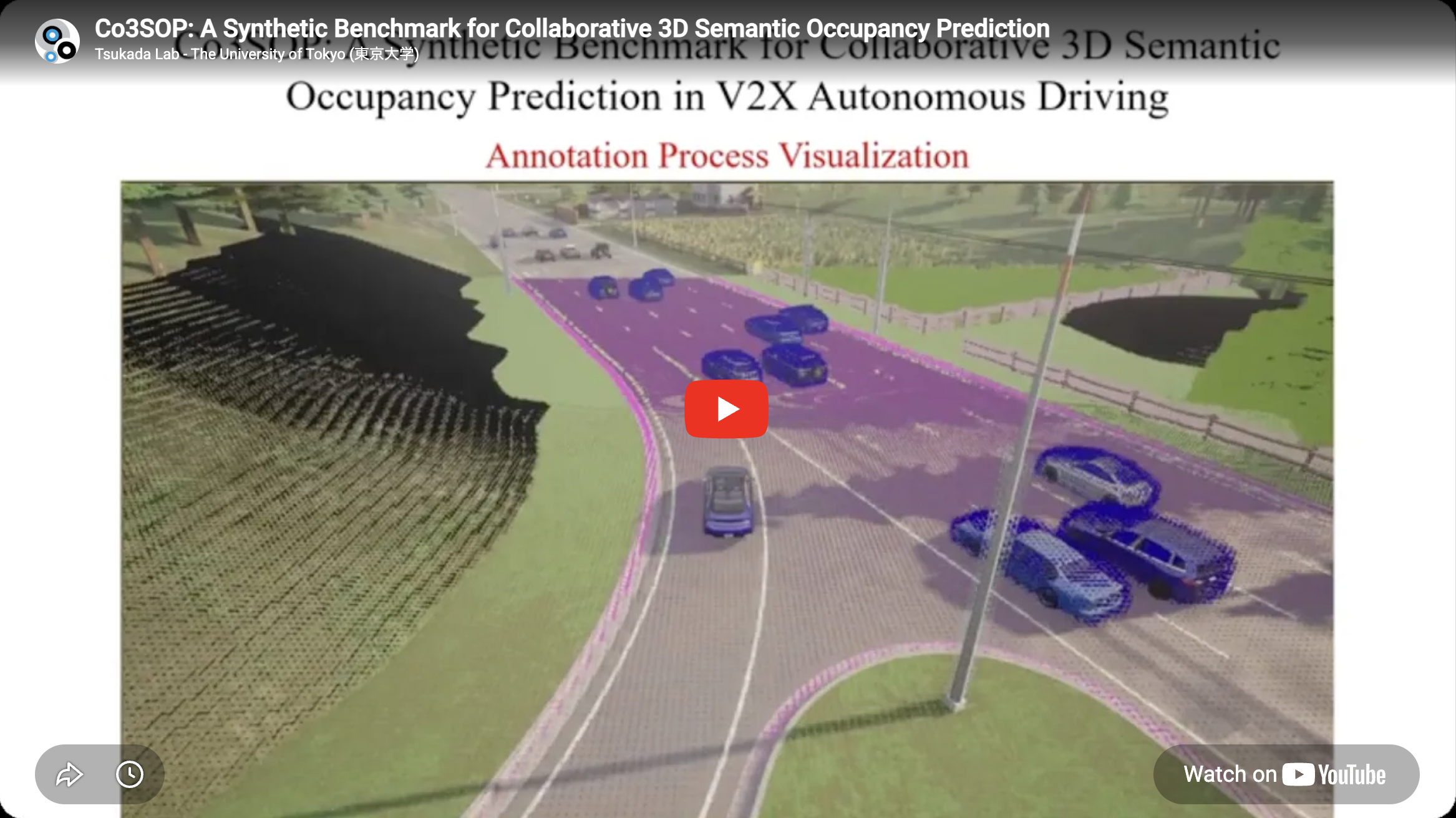
autonomous driving v2x
v2x

digital twins extended reality
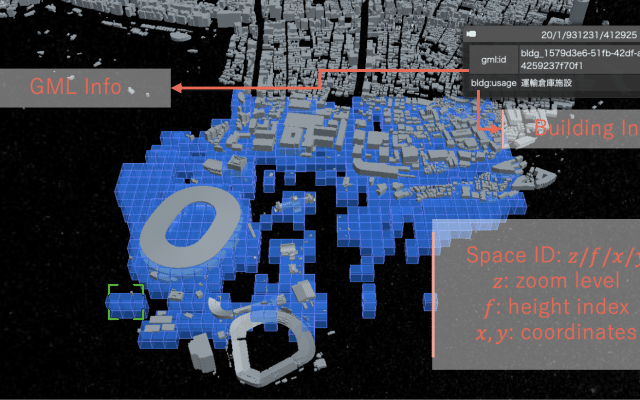
digital twins uav

autonomous driving machine learning

machine learning v2x
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}