0%




Level-4 autonomous flight of unmanned aerial vehicles (UAVs) is increasingly in demand for applications such as logistics, surveillance, and disaster response. However, ensuring safe navigation and precise path planning in dynamic environments remains a major challenge. Traditional methods focus heavily on spatial path generation under static assumptions, making them inadequate for adapting to moving or newly emerging obstacles. Furthermore, stable self-localization is difficult in environments where GPS is unavailable. To address these issues, this project aims to construct a scientifically rigorous and certifiable autonomous flight framework by integrating 4D spatiotemporal voxel representations, predictive world models, safety-constrained reinforcement learning, and Vision-Language/Action (VLM/VLA) modules.
The project introduces a 4D spatiotemporal voxel structure to represent static and dynamic obstacles in a unified way, with adaptive temporal resolution to predict future occupancy of nearby space. This supports efficient real-time updates of moving objects. Building on this representation, world models are employed to simulate environmental evolution, predicting trajectories of surrounding objects and environmental disturbances such as gusts or reduced visibility. Through short-horizon rollouts and counterfactual scenarios, the system transforms path planning into a risk-aware, forward-looking process, rather than a purely reactive response.
For decision-making, reinforcement learning (RL) is applied to optimize path following and obstacle avoidance, with explicit safety constraints. Offline pretraining on expert trajectories (e.g., A*, RRT*) provides efficient initial policies, while runtime shields based on control barrier functions and reachability analysis suppress unsafe actions during online learning. To enable navigation in GPS-denied environments, a VLM/VLA module integrates camera-based perception with natural-language instructions, allowing UAVs to understand and execute high-level mission commands (e.g., “survey this area and return”) even where mapping or GPS data are unreliable.
This research will present a new framework for Level-4 autonomous flight, combining rigorous spatiotemporal representation, learning-based control, formal safety assurance, and multimodal task understanding. Expected outcomes include measurable improvements in safety and efficiency in dynamic environments, enhanced GPS-independent localization and navigation, and a data representation foundation for future integration with Air Traffic Management (ATM) and Unmanned Traffic Management (UTM) systems. Looking forward, the project envisions extensions to multi-UAV coordination, weather-aware operations, certification frameworks based on learning assurance, and real-world flight demonstrations in logistics and emergency response scenarios.
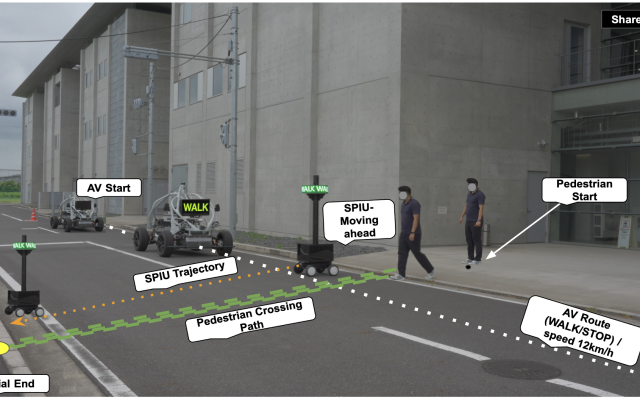
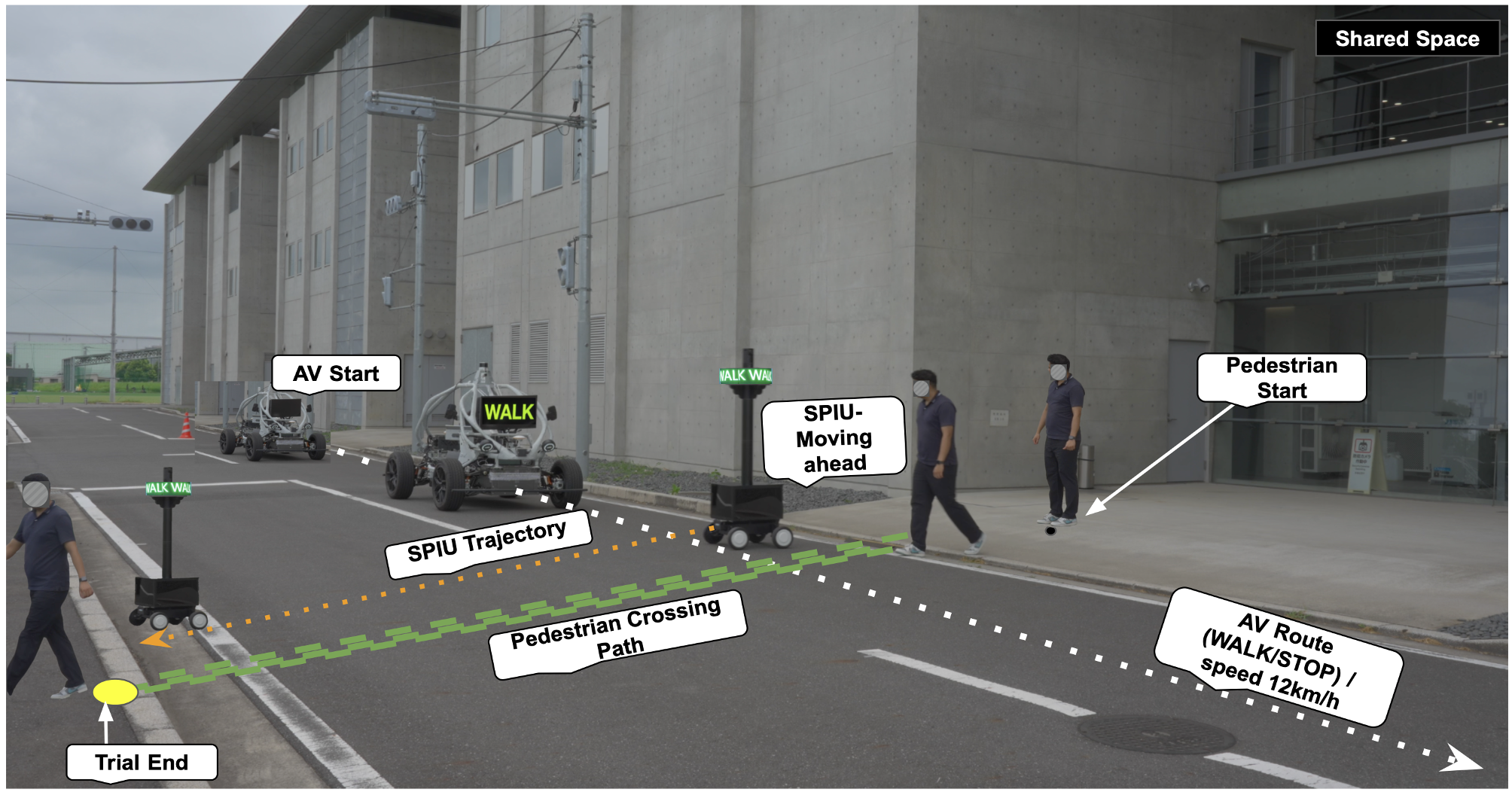
autonomous driving v2x
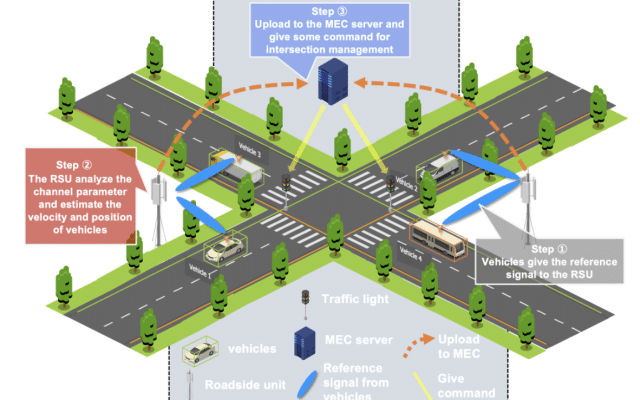
v2x

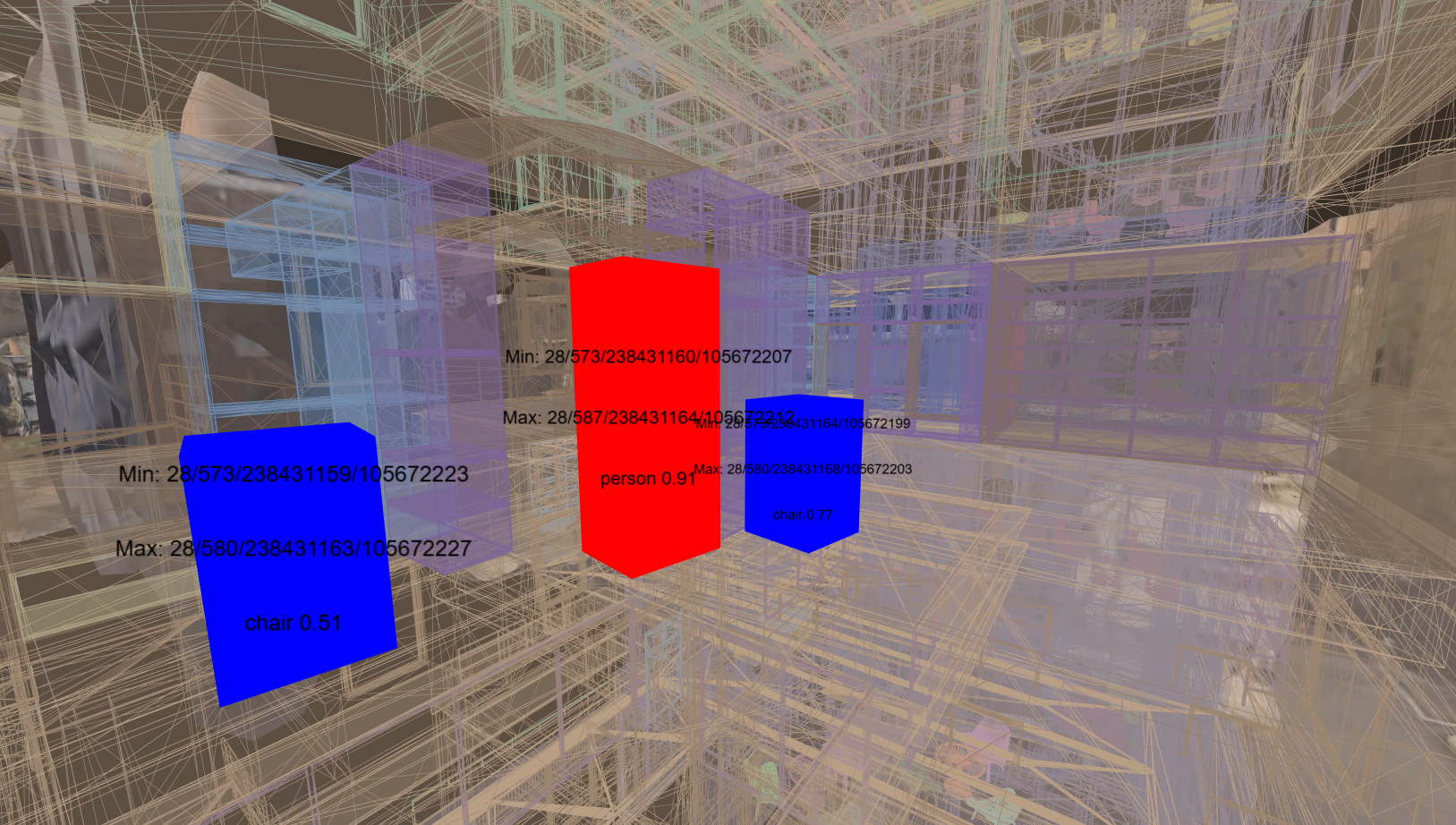
digital twins extended reality

digital twins

autonomous driving machine learning

machine learning v2x

autonomous driving v2x

extended reality
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}